- Flüsse und Schnitte in Netzwerken
-
Flüsse und Schnitte in Netzwerken sind Strukturen der Graphentheorie, die vielfältige Anwendungen finden.
Inhaltsverzeichnis
Definitionen, wichtige Begriffe und Eigenschaften
Netzwerk
Ein Netzwerk (engl. network) N = (G,u,s,t) besteht aus einem gerichteten Graphen G = (V,E) mit zwei ausgezeichneten Knoten (engl. vertex/vertices), einer Quelle (engl. source) s und einer Senke (engl. target) t aus V, sowie einer Kapazitätsfunktion
 die jeder Kante
die jeder Kante  eine nichtnegative Kapazität zuweist,
eine nichtnegative Kapazität zuweist,  . Hat die Kapazitätsfunktion ausschließlich ganzzahlige Werte, so existiert eine maximale Flussfunktion (siehe folgende Definition), die ebenfalls nur ganzzahlige Werte hat.
. Hat die Kapazitätsfunktion ausschließlich ganzzahlige Werte, so existiert eine maximale Flussfunktion (siehe folgende Definition), die ebenfalls nur ganzzahlige Werte hat.Fluss
-
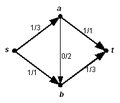
Beispiel für einen Fluss. Die Belegung steht zusammen mit der Kapazität an den einzelnen Kanten. Der Wert des s-t-Flusses ist 2.
-
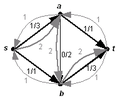
Beispiel für ein Residualnetzwerk. Auf dem Pfad s, a, b, t lässt sich der Fluss um den Wert 2 augmentieren.
Ein Fluss ist eine Funktion
 , die jeder Kante im Netzwerk einen nichtnegativen Flusswert
, die jeder Kante im Netzwerk einen nichtnegativen Flusswert  zuweist. Dabei muss folgende Bedingung erfüllt sein:
zuweist. Dabei muss folgende Bedingung erfüllt sein:- Kapazitätskonformität
Der Flusswert auf einer Kante ist höchstens so groß wie die Kapazität der Kante, das heißt es gilt:
 .
.Ist zusätzlich die folgende Bedingung erfüllt, heißt der Fluss s-t-Fluss:
- Flusserhalt
Abgesehen von der Quelle s und der Senke t muss in jeden Knoten genau so viel hineinfließen wie herausfließen, das heißt:
Dabei ist
die Menge der in v hineinführenden und
die Menge der aus v hinausführenden Kanten.
Gilt zudem Flusserhalt auch in s und t, hat man eine Strömung oder Zirkulation. Man kann zeigen, dass Inzidenzvektoren einer Zirkulation entsprechen, wenn sie im Zyklenraum Z(G) von G liegen.
Wert
Der Wert eines s-t-Flusses f ist der Überschuss im Knoten t oder der Betrag des Überschusses im Knoten s.
In Formeln:
 , wobei s die Quelle des Netzwerkes bezeichnet.
, wobei s die Quelle des Netzwerkes bezeichnet.
Für alle s-t-Flüsse ist der Überschuss bis auf s,t für alle Knoten Null. Für alle Zirkulationen ist er auch in s,t Null.
Exzess
Der Exzess
 eines Knotens v, oder auch Nettofluss oder Überschuss genannt, ist die Differenz der Summe der Flusswerte der eingehenden Kanten und der Summe der Flusswerte der ausgehenden Kanten.
eines Knotens v, oder auch Nettofluss oder Überschuss genannt, ist die Differenz der Summe der Flusswerte der eingehenden Kanten und der Summe der Flusswerte der ausgehenden Kanten.
Schnitt
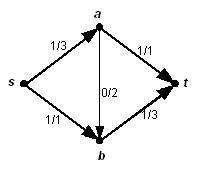
 Beispiel für einen Schnitt. Die Kapazität des Schnittes ist u((s,b)) + u((a,b)) + u((a,t)) = 1 + 2 + 1 = 4
Beispiel für einen Schnitt. Die Kapazität des Schnittes ist u((s,b)) + u((a,b)) + u((a,t)) = 1 + 2 + 1 = 4
Eine echte Teilmenge der Knoten S in einem Netzwerk, die s, aber nicht t enthält, nennt man einen s-t-Schnitt. Oft wird unter einem Schnitt auch die Menge aller Kanten verstanden, die zwischen den Partitionen S und
 verlaufen. Die Kapazität eines Schnittes ist die Summe der Kapazitäten der von S nach verlaufenden Kanten.
verlaufen. Die Kapazität eines Schnittes ist die Summe der Kapazitäten der von S nach verlaufenden Kanten.Schnitte geben eine obere Schranke für den Wert der s-t-Flüsse. Das Max-Flow-Min-Cut-Theorem besagt, dass auch umgekehrt Flusswerte eine Untere Schranke für Schnittkapazitäten sind. Beide Konzepte entsprechen also einander auf eine natürliche Art und Weise.
Residualnetzwerk
Das Residualnetzwerk Nf, oder auch Restnetzwerk, zum Fluss f mit Residualgraphen Gf und Residualkapazitäten uf zeigt die restlichen Kapazitäten des Netzwerks an. Der Residualgraph Gf hat dieselbe Knotenmenge wie G und besteht aus den von f nicht ausgelasteten Kanten ergänzt um Rückkanten: Für jede Kante
 mit f(e) > 0 enthält Ef eine Rückkante
mit f(e) > 0 enthält Ef eine Rückkante  . Die Residualkapazitäten uf(e) geben für eine Kante an, um wie viel der Fluss auf ihr noch erhöht werden kann, und für eine Rückkante
. Die Residualkapazitäten uf(e) geben für eine Kante an, um wie viel der Fluss auf ihr noch erhöht werden kann, und für eine Rückkante  , um wie viel der Fluss auf der zugehörigen Hinkante verringert werden darf. Also:
, um wie viel der Fluss auf der zugehörigen Hinkante verringert werden darf. Also: , falls f(e) < u(e)
, falls f(e) < u(e)
Algorithmische Konstruktion eines Residualnetzwerks
Initialisiere
 ;
;  ;
1. Für alle Kanten
2. if(f(e) > 0)
3. Füge in Ef ein
4. Setze
;
1. Für alle Kanten
2. if(f(e) > 0)
3. Füge in Ef ein
4. Setze  5. if(f(e) < u(e))
6. Füge e in Ef ein
7. Setze
5. if(f(e) < u(e))
6. Füge e in Ef ein
7. Setze  8. gib aus Nf = (V,Ef,uf,s,t)
8. gib aus Nf = (V,Ef,uf,s,t)
Schichtnetzwerk
Der Level eines Knotens
 ist die Anzahl der Kanten eines kürzesten Weges von s nach v im Residualnetzwerk zum Fluss f. Der i-te Level eines Graphen ist die Menge aller Knoten mit Level i also
ist die Anzahl der Kanten eines kürzesten Weges von s nach v im Residualnetzwerk zum Fluss f. Der i-te Level eines Graphen ist die Menge aller Knoten mit Level i also  . Eine Kante e = (u,v) mit Flusswert f(e) heißt nützlich von u nach v, falls f(e) < u(e). Falls gilt f(e) > 0, heißt sie nützlich von v nach u. Eine Kante heißt nützlich aus einer Menge, falls sie nützlich von einem Element der Menge in ein Element außerhalb der Menge ist. Analog erklärt man nützlich in eine Menge. Das Schichtnetzwerk oder Levelnetzwerk
. Eine Kante e = (u,v) mit Flusswert f(e) heißt nützlich von u nach v, falls f(e) < u(e). Falls gilt f(e) > 0, heißt sie nützlich von v nach u. Eine Kante heißt nützlich aus einer Menge, falls sie nützlich von einem Element der Menge in ein Element außerhalb der Menge ist. Analog erklärt man nützlich in eine Menge. Das Schichtnetzwerk oder Levelnetzwerk  zum Fluss f ist ein Teilgraph von G mit
zum Fluss f ist ein Teilgraph von G mitSchicht- und Residualnetzwerk können in linearer Laufzeit berechnet werden.
Besondere Wege und Flüsse
Ein x-y-Weg oder Pfad W(x,y) ist eine Folge von Kanten, wobei der Ausgangsknoten jeder Kante der Endknoten ihres Vorgängers ist. Die Länge eines Weges δW(x,y), auch distW(x,y) ist die Anzahl der Kanten im Weg.
Die Distanz zwischen x und y ist die Länge eines kürzesten Weges, falls einer existiert, und „unendlich“, falls nicht. Ein Weg im Residualnetzwerk heißt augmentierender Weg; die Bezeichnungen verbessernder Weg oder erhöhender Weg sind auch gebräuchlich. Jeder s-t-Fluss lässt sich in Flüsse auf s-t-Wegen und auf Kreisen zerlegen. Genau dann, wenn in einem Netzwerk zu einem s-t-Fluss kein augmentierender Weg existiert, hat der Fluss maximalen Wert. Diesen Sachverhalt nutzen der Algorithmus von Ford und Fulkerson und der Algorithmus von Edmonds und Karp aus.
Ein Fluss f in einem Netzwerk (G,u,s,t) heißt blockierend, falls in jedem s-t-Weg in G eine Kante e blockiert, oder auch saturiert, ist, d.h. f(e) = u(e).
Push-Operation  -> Voraussetzungen:
-> Voraussetzungen:  hat Exzess, uf(v,w) > 0 und
hat Exzess, uf(v,w) > 0 und  -> Beschreibung: Schiebe
-> Beschreibung: Schiebe  Einheiten Fluss von v nach w
1.
Einheiten Fluss von v nach w
1.  2.
2.  3.
3.  4.
4.  5.
5. 
Lift-Operation  Voraussetzungen: hat Exzess und es gilt für beliebige
Voraussetzungen: hat Exzess und es gilt für beliebige  :
:
 Beschreibung: inkrementiere die Höhe von v
1.
Beschreibung: inkrementiere die Höhe von v
1. 
Präflüsse
s-t-Präflüsse, oder auch Vorflüsse, (engl. preflow) sind eine Verallgemeinerung von s-t-Flüssen. Dieser Begriff ist nur bei komplexeren (und wesentlich effizienteren) Flussalgorithmen von Bedeutung.
Ein s-t-Präfluss ist eine Funktion
 mit Kapazitätskonformität wie oben und folgender Abschwächung des Flusserhalts:
mit Kapazitätskonformität wie oben und folgender Abschwächung des Flusserhalts:
Das bedeutet, nur den Knoten s darf mehr Fluss verlassen, als ihn erreicht. Ein s-t-Präfluss hat Überschuss in einem Knoten, oder auch Overflow, falls sein Überschuss (wie oben) echt größer als Null ist. Das Residualnetzwerk wird analog zu oben gebildet.
Die Höhenfunktion oder Distanzmarkierung in einem Netzwerk mit s-t-Präfluss f ist eine Abbildung
 mit
mit  ,
,  und
und  für alle Kanten
für alle Kanten  .
.Ferner erklärt man die Operationen Push und Lift algorithmisch, so wie rechts beschrieben. Mit diesen Mitteln kann man Preflow-Push-Algorithmen entwerfen und untersuchen, etwa den Goldberg-Tarjan-Algorithmus (nach Andrew Goldberg und Robert Tarjan). Bei diesen Algorithmen kann man die Datenstrukturen während der Algorithmus läuft nicht als s-t-Fluss interpretieren. Die Methode von Goldberg und Tarjan initialisiert einen Präfluss und terminiert, falls gewisse Manipulationen der Struktur einen s-t-Fluss liefern. Das ist dort stets nach endlich vielen Schritten der Fall und dieser s-t-Fluss ist dann stets maximal.
Algorithmen
Der Algorithmus von Ford und Fulkerson sucht nach und nach augmentierende Wege, also Wege im Residualnetzwerk, und erhöht dort entlang. Dieses Verfahren klappt genau dann, wenn dieser Algorithmus terminiert, also in die Situation kommt, dass es tatsächlich keine augmentierenden Wege mehr gibt. Dann kann man nämlich die maximale von s aus im Residualnetz erreichbare Knotenmenge betrachten. Diese definiert einen s-t-Schnitt, dessen Kapazität dem Flusswert gleicht.
Um das Terminieren aber zu sichern, kann man ein Argument über die algebraische Struktur der Kapazitätswerte heranziehen. Sind es nichtnegative ganze Zahlen, ist der Wert eines maximalen s-t-Flusses eine ganze Zahl. Zudem gibt es wenigstens einen maximalen s-t-Fluss, der kantenweise lediglich ganzzahlige Werte annimmt. Für jeden maximalen s-t-Fluss muss das nicht der Fall sein. Weil jedes Augmentieren entlang eines s-t-Weges den Wert des s-t-Flusses um einen ganzzahligen Schritt, also um mindestens 1 erhöht, ist die Terminierung nach endlich vielen Schritten in dem Fall gesichert. Eine obere Schranke der Laufzeit des Algorithmus kann dann von den Werten der Kapazitäten abhängen. Die Laufzeit kann dann in Bezug auf Anzahl der Knoten und Kanten beliebig groß sein, jenachdem welche Kapazitäten auf den Kanten gegeben sind. Sind die Kapazitäten nichtnegative rationale Zahlen, terminiert der Ford-Fulkerson-Algorithmus ebenfalls, weil das Netzwerk dann algorithmisch äquivalent zu einem Netzwerk ist, bei dem die Kapazitäten mit dem Hauptnenner multipliziert sind, also nur ganzzahlige Kapazitäten auftreten. Bei reellen, irrationalen Kapazitäten muss der Algorithmus jedoch nicht terminieren und noch nicht einmal gegen einen maximalen s-t-Fluss konvergieren.
Der Edmonds-Karp-Algorithmus stellt eine Weiterentwicklung der Methode von Ford und Fulkerson dar: Er funktioniert ganz analog, sucht aber augmentierende Wege, die bezüglich Kantenanzahl minimal sind. Das geht mit einer Breitensuche jeweils in linearer Laufzeit. Der Edmonds-Karp-Algorithmus terminiert auch bei beliebigen reellen Kantenkapazitäten. Darüber hinaus ist seine Laufzeit
 , also im Allgemeinen größenordnungsmäßig deutlich besser als der Ford-Fulkerson-Algorithmus.
, also im Allgemeinen größenordnungsmäßig deutlich besser als der Ford-Fulkerson-Algorithmus.Der Dinic-Algorithmus basiert auf einer weiteren Beobachtung. Sucht man im Residualnetzwerk nach einem augmentierenden Weg, kann es passieren, dass man in Sackgassen gerät, also zu einem Knoten, von dem aus t gar nicht erreichbar ist. Die Idee ist, das Netzwerk zu schichten, also in Gruppen zusammenzufassen, die dieselbe Entfernung zu s haben, also solche Sackgassen eliminiert sind. In diesem Schichtnetzwerken nutzt man dann ferner aus, dass eine Suche nicht nur einen Weg liefert, sondern immer auch ohne zusätzlichen Aufwand einen Wegbaum. Entlang dieses Baumes kann man dann Fluss schicken und das Netzwerk blockieren. Das geht alles elementar in
 mit einer modifizierten Tiefensuche. In der nächsten Iteration hat man dann die Situation, wenigstens eine Schicht mehr zu benötigen, weil die alte Schichtung blockiert ist. Das Argument zur Beschränkung der Schichtzahl auf höchstens | V | − 1 Stück liefert eine Schranke an die Anzahl der sogenannten Phasendurchläufe des Algorithmus', also die Anzahl der Schleifeniterationen. Somit ergibt sich eine Laufzeit von
mit einer modifizierten Tiefensuche. In der nächsten Iteration hat man dann die Situation, wenigstens eine Schicht mehr zu benötigen, weil die alte Schichtung blockiert ist. Das Argument zur Beschränkung der Schichtzahl auf höchstens | V | − 1 Stück liefert eine Schranke an die Anzahl der sogenannten Phasendurchläufe des Algorithmus', also die Anzahl der Schleifeniterationen. Somit ergibt sich eine Laufzeit von  .
.Die folgende Tabelle gibt eine Übersicht der entwickelten Fluss-Algorithmen und ihrer Laufzeiten:
Max-Flow Algorithmen nach Veröffentlichung
Jahr Autor(en) Name Laufzeiten 1956 Ford, Fulkerson Algorithmus von Ford und Fulkerson  , falls alle Kapazitäten ganzzahlig sind
, falls alle Kapazitäten ganzzahlig sind1969 Edmonds, Karp Algorithmus von Edmonds und Karp 
1970 Dinic Algorithmus von Dinic 
1973 Dinic, Gabow 
1974 Karzanov 
1977 Cherkassky 
1980 Galil, Naamad 
1983 Sleator, Tarjan 
1986 Goldberg, Tarjan Goldberg-Tarjan-Algorithmus 
1987 Ahuja, Orlin 
1987 Ahuja, Orlin, Tarjan 
1990 Cheriyan, Hagerup, Mehlhorn 
1990 Alon ![\mathcal{O}\left(m\cdot n+\sqrt[3]{n^8}\cdot \log\left(n\right)\right)](d/02da7a7bef2ec5a06721320fe7c1db2b.png)
1992 King, Rao, Tarjan 
1993 Philipps, Westbrook[1] 
1994 King, Rao, Tarjan[2] 
1997 Goldberg, Rao[3] ![\mathcal{O}\left(\min\{\sqrt{m}, \sqrt[3]{n^2}\} \cdot m\cdot \log\left(\frac{n^2}{m}\right)\cdot \log(u_{\max})\right)](d/74d575aac6041d6448778205cb69fd01.png)
- Legende
- n = | V | = „Anzahl der Knoten“
- m = | E | = „Anzahl der Kanten“
- umax = „Maximum der Kapazitätsfunktion u“
- ↑ Steven J. Phillips, Jeffery Westbrook: On-Line Load Balancing and Network Flow. In Algorithmica Volume 21, Number 3, Juli 1998 245-261
- ↑ V. King, S. Rao, R. Tarjan: A Faster Deterministic Maximum Flow Algorithm. In Journal of Algorithms, Volume 17, Issue 3, November 1994 447-474
- ↑ Dávid Papp: The Goldberg–Rao Algorithm for the Maximum Flow Problem (2006)
Verallgemeinerungen
Zu dem Problem gibt es einige wesentliche Verallgemeinerungen. Als erstes kann man anstelle von Flüssen zwischen einer Quelle beziehungsweise Senke solche zwischen Gebieten betrachten. Dazu gibt man sich eine gewisse Menge von Versorgern S und eine Menge von Empfängern T vor, sowie einen Graphen und Kapazitäten. Das Problem ist nicht schwerer als Max-Flow und kann entweder durch Vor- und Nachschalten von Zusatzknoten oder durch Übergang zum Quotientengraphen
 auf Max-Flow reduziert werden.
auf Max-Flow reduziert werden.Andererseits kann man die Gültigkeit der den Kanten zugewiesenen Kapazitäten auf eine gewisse Umgebung der Kante ausweiten, wobei für ein festgehaltenes
 eine d-Umgebung die Menge von Knoten und Kanten ist, die d Elemente von der Kante entfernt liegen. Der Spezielfall d = 0 entspricht gerade dem maximalen Flussproblem. Der Fall d = 1 entspricht dem maximalen Flussproblem mit Knotenkapazitäten. Das kann auf Max-Flow reduziert werden, indem die Knoten durch ein Gebilde, wie im Bild ersetzt werden. Dabei wird die Kantenzahl nicht konstant verändert, also die Komplexität des Problems erhöht. Es existieren aber Lösungen für Max-Flow, deren Komplexität streng von den Knoten abhängt, deren Zahl sich höchstens um den konstanten Faktor 2 ändert.
eine d-Umgebung die Menge von Knoten und Kanten ist, die d Elemente von der Kante entfernt liegen. Der Spezielfall d = 0 entspricht gerade dem maximalen Flussproblem. Der Fall d = 1 entspricht dem maximalen Flussproblem mit Knotenkapazitäten. Das kann auf Max-Flow reduziert werden, indem die Knoten durch ein Gebilde, wie im Bild ersetzt werden. Dabei wird die Kantenzahl nicht konstant verändert, also die Komplexität des Problems erhöht. Es existieren aber Lösungen für Max-Flow, deren Komplexität streng von den Knoten abhängt, deren Zahl sich höchstens um den konstanten Faktor 2 ändert.Für den Fall
 kann man beweisen, dass das Problem NP-vollständig, das heißt eines der „schwersten“ Probleme überhaupt, ist. für den Fall d = 2 ist ein polynomieller Algorithmus gefunden.
kann man beweisen, dass das Problem NP-vollständig, das heißt eines der „schwersten“ Probleme überhaupt, ist. für den Fall d = 2 ist ein polynomieller Algorithmus gefunden.Anwendung
Praktische Anwendungen
Diese letzte Verallgemeinerung ist motiviert durch Probleme bei der Verkabelung von VLSI-Chips, wo es aufwändig ist, in eine gewisse Nähe von gelegten Kabeln weitere zu setzen.
Die Flusstheorie hat sich historisch ausgehend von Problemen aus der Anwendung entwickelt. Allgemein ist man von der Situation ausgegangen, ein Fluid, also ein beliebig in Untergegenstände zerlegbaren Gegenstand, auf verschiedenen Wegen durch eine Welt räumlich zu verlagern – etwa elektrische Energie über ein Stromnetzwerk von einer Quelle an einen Bedarfsort, oder Daten durch ein Datennetzwerk von einem Sender zu einem Empfänger. Auch abstrakte Gegenstände wie „einander kennen“ kann man modellieren. Durch maximale Flüsse in einem sozialen Netzwerk kann man dann ein Maß dafür erhalten, wie stark zwei (Mengen von) Personen miteinander vernetzt sind.
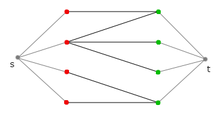 Bipartiter Graph mit der Knotenmenge A (rot) und B (grün) und der ergänzten Quelle s und Senke t
Bipartiter Graph mit der Knotenmenge A (rot) und B (grün) und der ergänzten Quelle s und Senke tTheoretische Anwendungen
Eine naheliegende und natürliche Anwendung hat die Flusstheorie bei der Transversalentheorie, die sich auf sehr natürliche Art und Weise in die Theorie der Flüsse einbetten lässt. Einen umfassenden Ansatz, das zu tun, hat Ford 1962 in einem Standardwerk formuliert.
Auch viele kombinatorische Probleme auf Graphen, wie bipartite Matchings, lassen sich leicht in ein geeignetes Flussproblem überführen (siehe Bild) und dort schnell lösen. Eine weitere Anwendung ist das effiziente Ermitteln der Knotenzusammenhangszahl und Kantenzusammenhangszahl. Durch das Lemma von Tutte (nach William Thomas Tutte) werden zudem Anwendungen erweiterter Flusstheorie (sogenannten gruppenwertigen Flüssen) und Färbbarkeitsaussagen deutlich. Einige Vermutungen von ihm zur Existenz von k-Flüssen in planaren Graphen hätten starke theoretische Implikationen.
Literatur
- Bernhard Korte, Jens Vygen: Kombinatorische Optimierung: Theorie und Algorithmen. Aus dem Englischen von Rabe von Randow. Springer-Verlag, Berlin Heidelberg 2008, ISBN 978-3-540-76918-7
- Alexander Schrijver: Combinatorial Optimization: Polyhedra and Efficiency, Springer-Verlag, 2003, ISBN 3-540-44389-4
- Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, Clifford Stein: Introduction to Algorithms. 2. Auflage. MIT Press, Cambridge (Massachusetts) 2001, ISBN 0-262-03293-7.
- Lester Randolph Ford junior, Delbert Ray Fulkerson: Flows in Networks. 1962, ISBN 0-691-07962-5, ISBN 978-0-691-07962-2.
-







Wikimedia Foundation.