- Roboterkalibrierung
-
Roboterkalibrierung bezeichnet das Ermitteln der verschiedenen Parameter der Robotermechanik, um ein vollständiges kinematisches Modell des Roboters zu erhalten. Die Kalibrierung von Roboter, Werkzeug und Werkstück (Zellenkalibrierung) kann die vorhandenen Ungenauigkeiten reduzieren bzw. minimieren. Durch die Kalibrierung kann auch die Prozesssicherheit gesteigert werden.
Die Positioniergenauigkeit von Industrierobotern (IR) ist für bestimmte Aufgaben oft unzureichend. Insbesondere beim Robotertausch und bei der Programmierung von Präzisionsanwendungen können Probleme auftreten, deren Beseitigung sehr zeit- und kostenintensiv sein kann.
Inhaltsverzeichnis
Kenngrößen und Fehlereinflüsse
Die internationale Norm ISO 9283 legt verschiedene Leistungskriterien für IR fest und schlägt Prüfverfahren zu deren Ermittlung vor. Die wichtigsten Kenngrößen stellen die Absolutgenauigkeit (accuracy of pose or path, AP) und die Wiederholgenauigkeit (repeatability of pose and path, RP) dar. Dies sind die allgemein gebräuchlichen Kriterien.
Die Wiederholgenauigkeit ist nicht nur beim Programmieren des Roboters durch Anlernen („Teach-In“) entscheidend, sondern bei jedem anspruchsvolleren Prozess. Dies ist also unabhängig davon, ob der Roboter nur "geteached" wird, oder ob die Daten per "offline-Programmierung" generiert wurden.
Wenn das Bewegungsprogramm allerdings per 3D-Simulation („offline-Programmierung“) erstellt wird, ist auch die Absolutgenauigkeit eines IR von Bedeutung. Sie wird generell durch verschiedene Faktoren negativ beeinflusst. Dabei kommt den Achsnulllagen sowie den Längen- und Winkelfehlern zwischen den einzelnen Robotergliedern die größte Bedeutung zu. Diese in Verbindung mit der variablen Last am Flansch eines IR, stellen die größten Fehlerquellen dar. Aber auch Längenänderungen auf Grund von Temperaturschwankungen leisten einen Beitrag zur Positionsänderung eines Roboters, die je nach Roboterprogramm bzw. Erwärmung der Maschine einen Beitrag deutlich über der Wiederholgenauigkeit leisten können.
Messsysteme
Es existieren verschiedene Möglichkeiten der Positionsmessung bei Industrierobotern, zum Beispiel das Anfahren von Musterwerkstücken, die Verwendung von Ultraschallsensoren, Laserinterferometrie, Theodoliten, Messtastern oder Lasertriangulation. Außerdem gibt es Kamerasysteme, die in der Roboterzelle oder am IR selbst angebracht sein können und die Position eines Referenzobjektes erfassen. Anbieter von Messsystemen sind zum Beispiel die Firmen Perceptron, NDI, HGV Vosseler, Dynalog, FARO, Leica, Metris, Wiest und Teconsult.
Mathematische Grundlagen
 Zielfunktion und Optimierungsproblem
Zielfunktion und Optimierungsproblem
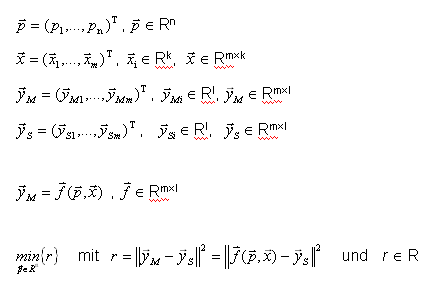
Die mittels Positionsmessung erfassten Roboterfehler können mit numerischer Optimierung im Rahmen einer Ausgleichsrechnung minimiert werden. Dazu muss zunächst ein vollständiges kinematisches Modell der geometrischen Struktur erstellt werden, dessen Parameter dann durch mathematische Optimierung ermittelt werden. So lässt sich aus den Eingangs- und Ausgangsgrößen in Vektorschreibweise das allgemeine Systemverhalten mit der vektoriellen Modellfunktion folgendermaßen formulieren (s. Bild). Die Variablen k, l, m, n sowie deren Verknüpfungen beschreiben die Dimensionen der einzelnen Vektorräume. Die Minimierung des Restfehlers r zur Identifikation eines optimalen Parametervektors p folgt aus der Differenz der beiden Ausgangsvektoren unter Verwendung der euklidischen Norm.
Für die Lösung der kinematischen Optimierungsprobleme eignen sich u.a. Least-Squares-Abstiegsverfahren, zum Beispiel ein modifiziertes Quasi-Newton-Verfahren. Diese Methode liefert korrigierte Kinematikparameter für die vermessene Maschine, die dann zum Beispiel in der Robotersteuerung eingetragen werden können, um das dort verwendete Rechenmodell an die reale Kinematik anzupassen.
Ergebnisse
Die absolute Positioniergenauigkeit von Industrierobotern schwankt je nach Hersteller, Alter und Beanspruchung zwischen wenigen Zehnteln und mehreren Millimetern. Durch Kalibrierung kann üblicherweise eine Positioniergenauigkeit von ca. 0,5 mm erreicht werden, die bei Begrenzung des Arbeitsvolumens auch an die sonst übliche Wiederholgenauigkeit eines Roboters von ca. 0,1 mm heranreichen kann.
Anwendungsbeispiele
 In-line-Messzelle zur Karosserievermessung
In-line-Messzelle zur KarosserievermessungIn der Industrie besteht z.Zt. ein allgemeiner Trend zur Substitution von Werkzeug- oder Spezialmaschinen durch Industrieroboter für bestimmte Fertigungsaufgaben, deren Genauigkeitsansprüche durch kalibrierte Roboter erfüllt werden können. In der Abbildung wird ein aktuelles Beispiel dargestellt: die In-line-Messtechnik im Karosseriebau, wo die bisher zur 100%-Kontrolle eingesetzten „Messtunnel“ mit vielen teuren Sensoren z.T. durch IR ersetzt werden, die jeweils nur einen Sensor führen. Dadurch können die Gesamtkosten einer Messzelle deutlich reduziert werden. Darüber hinaus ist die Anlage bei einem Modellwechsel durch einfache Neuprogrammierung ohne bauliche Veränderungen wiederverwendbar.
Weitere Beispiele für Präzisionsanwendungen sind das robotergestützte Rollfalzen im Karosseriebau, die Montage von Mobiltelephonen, Bohren, Nieten und Fräsen im Flugzeugbau sowie zunehmend medizinische Applikationen.
Zusammenfassung
Durch den Einsatz effizienter Kalibriermethoden ist es möglich, mit heute am Markt verfügbaren Industrierobotern – insbesondere parallelkinematischen – eine absolute Positioniergenauigkeit von 0,1 mm zu erreichen, um so die Austauschbarkeit zu verbessern, die off-line-Programmierung zu vereinfachen und neue, hochpräzise Anwendungen zu ermöglichen.
Literatur
- Lukas Beyer: Genauigkeitssteigerung von Industrierobotern, insbesondere mit Parallelkinematik. Dissertation, Helmut-Schmidt-Universität Hamburg. Shaker Verlag, Aachen 2005, ISBN 3-8322-3681-3
- Klaus Schröer: Identifikation von Kalibrationsparametern kinematischer Ketten. Dissertation, Technische Universität Berlin. Hanser Fachbuchverlag, München 1993, ISBN 3446176500
- Ulrich Wiest: Kinematische Kalibrierung von Industrierobotern. Dissertation, Universität Karlsruhe. Shaker Verlag, Aachen 2001, ISBN 3-8265-8609-3
- N.N.: ISO 9283 - Manipulating industrial robots. Performance criteria and related test methods. ISO, Genf 1998
Weblinks
- http://www.hsu-hh.de/download-1.4.1.php?brick_id=LrRpmKlYVaAX4wma – Helmut-Schmidt-Universität
Wikimedia Foundation.