- Schnorchel (U-Boot)
-
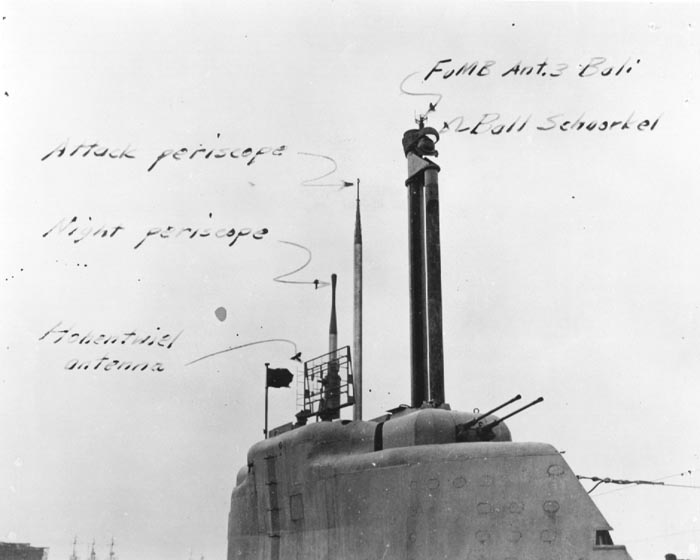
 Schnorchel auf U-3008 in US-amerikanischer Erprobung. Die Amerikaner hatten das hintere Ende des Turms strömungsgünstiger um- und die Flak ausgebaut.
Schnorchel auf U-3008 in US-amerikanischer Erprobung. Die Amerikaner hatten das hintere Ende des Turms strömungsgünstiger um- und die Flak ausgebaut.
Der Schnorchel beziehungsweise Luftzufuhrmast versorgt Dieselmotoren an Bord von U-Booten mit Frischluft und entsorgt je nach Bauart deren Abgasluft. Durch diese Technik brauchen dieselgetriebene U-Boote nicht mehr aufzutauchen, um ihre Batterien aufzuladen. Der Schnorchel ist eine Erfindung der niederländischen Leutnante Jan Jacob Wichers und J.C. van Pappelendam und wurde erstmals 1939 auf Niederlande im Jahr 1940 wurden die fertiggestellten bzw. im Bau befindlichen Snuiverboote O 25, O 26 und O 27 von der Kriegsmarine übernommen. O 26 wurde in UD 4 umbenannt und für Schnorchel-Tests im Atlantik genutzt. Kurz danach wurden die Luftmaste wie bei den in England angekommenen holländischen U-Booten ausgebaut.[1] Die deutschen Verantwortlichen beim UAK (U-Boot-Abnahmekommando) waren zu dem Schluss gekommen, diese Technik sei überflüssiger Ballast, der im rauhen Atlantik nicht einsetzbar sei, wo ein Schnorchel bei hohem Wellengang ständig Wasser ziehen würde.
Inhaltsverzeichnis
Neue Einsatzperspektiven
Im Verlauf des U-Boot-Krieges im Rahmen des zweiten Weltkrieges wurden die deutschen Verluste durch Radarortung der damals zu langen Überwasserfahrten gezwungenen U-Boote immer größer. Hellmuth Walter erinnerte sich an die holländischen Snuivers und griff in einem Gespräch am 2. März und Schreiben vom 19. Mai 1943 an Karl Dönitz die Idee des Schnorchels nochmals auf.
Entscheidend für die praktische Realisierbarkeit war seine neue Idee, die Luft zum Betrieb der Dieselmotoren beim Unterschneiden des Schnorchels durch Seegang bis zu 1,5 Minuten lang aus dem Bootsinneren zu saugen. Der Schnorchel sollte für eine Wellenlänge Luft ziehen und sich beim Unterschneiden automatisch verschließen. Dönitz unterstützte die Idee und ließ sie umsetzen[2].
Schwere Pannen beim Aufstellen und Umklappen des Schnorchels oder der Mechanik des Zu- und Abluftsystems waren anfangs eher die Regel. Die Höchstgeschwindigkeit war bei Schnorchelfahrt wegen Sehrohr- und Schnorchelschwingungen auf fünf bis sechs Knoten beschränkt. Die Vibrationen machten die ausgefahrenen Sehrohre fast unbenutzbar, deren Optik sich häufig verschob. Abgas und Gischt vor den Sehrohren behinderten die Sicht und ermöglichten bei Tageslicht die optische Erkennung schnorchelnder U-Boote.
Trotz aller Bemühungen drangen Dieselabgase in das Bootsinnere ein, verursachten bei der Besatzung Kopfschmerzen und trübten den Blick. Eine dadurch verursachte Kohlenmonoxidvergiftung machte sich erst Stunden nach der Durchlüftung des Bootes bemerkbar und waren dann so stark, dass das Auftauchen und Öffnen des Turmlulks nur noch unter größtem Energieaufwand möglich war. Zudem konnte der Abfall der nun ständig getaucht operierenden U-Boote nicht mehr entsorgt werden, was die ohnehin schlechte, weil nur selten erneuerte Luft im Bootsinneren weiter verschlechterte.
Um der gegnerischen Radarortung zu entgehen, wurde der Schnorchel meist so tief wie möglich gefahren, unterhalb der maximalen Wellenhöhe, so dass er häufig von den Wellen überspült wurde. Dies führt, je nach Seegang, Maschinenleistung, Bootsgröße und Druckabfall bis zum Abschalten der Diesel zu einer zusätzlichen Belastung der Besatzung durch Luftdruckschwankungen von bis zu 200 mbar im Bootsinneren. Bei zu großem Abgasgegendruck durch zu tiefes Unterschneiden (z.B. durch Tiefensteuerfehler) können die Dieselmotoren stehenbleiben und ihr Abgas rückwärts aus ihren Ansaugschächten im Bootsinneren austreten. Dies kann zur Vergasung des Bootes und Gefährdung seiner Besatzung führen.
Die Saugleistung der Diesel war in der Praxis größer und schneller als erwartet. Sobald der Druck im Bootsinneren vom Normalwert 1020 mbar auf 850 mbar gefallen war, wurde einer der Diesel abgestellt, ab 750 mbar auch der zweite und mit Elektromotoren weitergefahren. Die Druckschwankungen führten zu starken Schmerzen, Ohnmachtsanfällen und gerissenen Trommelfellen beim späteren plötzlichen Druckausgleich. Für die Zuluft hatte der Schnorchelkopf ein schwimmerbetätigtes Schnorchelkopfventil, das bei seiner Überflutung automatisch schließen sollte. Die schwimmerbetätigten Ventile waren im Betrieb nicht störungsfrei. Ihre Funktion war abhängig vom Kurs des Bootes zur Seegangsrichtung und es gab kein Mittel gegen Vereisung.
Wegen seines Diesellärms konnte ein U-Boot bei Schnorchelfahrt leicht mit Hydrophonen auf Schiffen oder von Flugzeugen abgeworfenen Sonobojen geortet werden, während das eigene Horchgerät nahezu "taub" wurde. Deshalb musste der Schorchelbetrieb in gewissen Abständen zum Rundhorchen unterbrochen werden. Der bei Unterwasserfahrt stark erhöhte Wasserwiderstand der für Überwasserfahrt optimierten älteren Bootstypen erhöhte den Dieselverbrauch gegenüber aufgetauchter Fahrt fast auf das Doppelte.
Dies wurde aufgrund der Gefahr durch mit Radar ausgerüstete Flugzeuge und Überwassereinheiten in Kauf genommen. Viele Kommandanten hatten anfangs Probleme mit dieser Art von Tauchfahrt, zumal die Ventile unter Dichtigkeitsproblemen litten, bis der Ritterkreuzträger H. „Mörle“ Schröteler von einer Feindfahrt zurückkehrte und in der Kommandantenrunde erklärte, dass er keine Probleme mit der „Schnorchelei“ gehabt hätte. Nach und nach wurde die Schnorcheltechnik im Bootseinsatz verbessert.
Nunmehr war es möglich, in etwa 16 Metern Tiefe (Unterkante Kiel) mit den Dieselmotoren zu fahren, die Batterien zu laden, das Boot mit frischer Luft zu versorgen und dennoch weitgehend unentdeckt zu bleiben. U 977 und U 978, zwei Boote vom Typ VII C mit an Deck niederlegbaren Schnorchelmasten, waren 66 bzw. 68 Tage unter Wasser. In der Regel nutzten die U-Boote den Schnorchel in der Nacht nur vier Stunden täglich, um ihre Batterien wiederaufzuladen und fuhren ansonsten getaucht mit sparsamer und sehr langsamer Fahrt von 1-3 Knoten mit Elektromotoren. Deshalb konnten sie im Durchschnitt nur 90 km pro Tag zurücklegen.
Schutz gegen Radarortung
Anfangs stand den Alliierten zur Ortung der U-Boote nur Dezimeterwellen-Radar zur Verfügung. Im Februar 1942 wurde das amerikanische Zentimeterwellen-Radar „AS-G" für Flugzeuge zur Massenproduktion angefordert. Es konnte Geleitzüge in knapp 160 km Entfernung und aufgetauchte U-Boote in über 17 km Entfernung orten. Die Variante „S-G" für Schiffe folgte kurze Zeit später. Die deutscherseits für die Tarnung der U-Boote zuständige AG „Schwarzes Uboot“ entwicklelte gegen die aktive Radarortung zunächst bestimmte Frequenzbereiche absorbierende Konstruktionen für den U-Boot-Turm und gegen die aktive Sonarortung die Alberich-Haut, die jedoch beide unter mangelnder Seefestigkeit litten.
Gegen die für die U-Boote besonders gefährliche aktive Radarortung wurde statt dessen der Schnorchel das wirksamste Gegenmittel. Ein ungetarnter Schnorchelkopf hat noch etwa 20 % der Echowirkung eines aufgetauchten U-Bootes. Nach britischen Verbesserungen konnten ab Herbst 1944 auch kleine Ortungsziele wie Schnorchelköpfe oder Sehrohre mit Radar im Gigahertzbereich geortet werden. Unter günstigen Umständen sank die Ortungsreichweite durch den Schnorchel auf ein Viertel der Breitseitenreichweite des aufgetauchten Bootes. Zudem war es mit Radar allein nicht ohne weiteres möglich, die Schnorchelköpfe der U-Boote von anderen auf dem Wasser schwimmenden Objekten zu unterscheiden.
Für das Radar „AN/APS-15“ bzw. „ASG“ wurde bei alliierten Versuchen eine Schnorchel-Ortungsreichweite von 10,5 bzw. 4,1 Meilen (rund 17 bzw. 6,6 km) ermittelt. Bei Seegang Stärke 1 und 2 handelte es sich bei 82 bzw. 67 % der erkannten Ziele um Schnorchel, bei Seegang Stärke 3 und 4 waren es noch 55 bzw. 32 %. Aus statistischen Einsatz-Daten wurde dagegen nur eine mittlere praktische Ortungsreichweite von 0,1 Meilen bzw. 0,6 Meilen (rund 0,2 bzw. 1,1 km) bei Tageslicht abgeleitet. Es zeigte sich, dass der Schnorcheleinsatz ein sehr erfolgreiches Mittel gegen Radarortung war.[3]
Zur Tarnung des Schnorchels gegen Radarortung gelang Prof. J. Jaumann zusammen mit der IG Farben im Frühjahr 1944 die Entwicklung eines Schalen-Sumpfes („Leitwert-Sumpf“) aus halbdurchlässigem Papier und dielektrischen Stützschichten mit sehr niedriger Dielektrizitätskonstante. Anfängliche Wasser- und Druckfestigkeitprobleme waren mit dem Kunststoff Zelligelit gelöst worden. Als maximale Tauchtiefe, der die Absorptionsschicht ohne dauerhaften Verlust ihrer Wirksamkeit standhalten sollte, wurden 150 Meter spezifiziert und etwa 200 Meter erwartet. Sie hatte eine Restreflexion von unter 10 % im Bereich 30 bis 3 cm = 1–10 GHz. Es wurde erwartet, dass ein damit getarnter Schnorchel mit Zentimeterwellen-Radar bei einer Restreflexion zwischen 0,25 und 8 % und einer um mindestens 65 % reduzierten Ortungsreichweite auf eine Entfernung von maximal 5 km geortet werden konnte.
Der Jaumann-Absorber war 68 mm dick und zur Befestigung auf mehrfach gewölbten Oberflächen wenig geeignet. Er erforderte ein geändertes Schnorchelkopfventil mit Ringschwimmer statt dem bisherigen Kugelschwimmer. Bei Versuchen zeigte das Ringschwimmerventil ein trägeres Schließverhalten als das Kugelschwimmerventil. Zur Tarnung des Kugelschwimmer-Ventils wurde eine nach dem Prinzip der abweisenden Tarnung arbeitende Blechkegelkonstruktion („Lampenschirm“) verwendet. Sie wurde im Sommer 1944 auf U 1024, U 1060 und U 1064 eingebaut.
Später stellte sich der von Prof. Wesch im Weltpost-Institut Heidelberg entwickelte geriffelte Gummiüberzug („Weschmatte“) als bessere Lösung zur Radar-Absorption heraus, denn er war wegen seiner geringeren Dicke von 4–8 mm besser für die Kugelschwimmer-Ventile geeignet. Das Radarecho verringerte sich im Bereich von 20 bis 3 cm Wellenlänge = 1,5–10 GHz auf eine Restreflexion von durchschnittlich 10 %. Im Bereich 13–2,3 cm = 2,3–13 GHz betrug das Maximum der Restreflexion bei 5 cm = 6 GHz 30 %. Die Minima der Reflexionskurve lagen unter 5 % bei 9 cm = 3,3 GHz (britisches Rotterdam-Gerät) und unter 10 % bei 3 cm = 10 GHz (amerikanisches MEDDO-Gerät). Für das britische Rotterdam-Gerät wurde dadurch eine Reduzierung seiner Ortungsreichweite um 50 % erwartet.[4] Im November 1944 wurde die Weschmatte auch für die Ringschwimmerventile freigegeben.
Daneben kamen als Werkstoffe Ummantelungen aus Holzlatten (deren Stöße sorgfältig abgedeckt waren) und Glaswolle zum Probeeinsatz. So waren die Schnorchelköpfe zwar nicht unsichtbar, aber die Erkennungswahrscheinlichkeit schnorchelnder Boote wurde wesentlich reduziert.
Mit einer auf dem Schnorchel montierten Rundantenne („Bali“) konnten mit dem Naxos-Radardetektor auch während des Schnorchelbetriebs im Zentimeter-Bereich arbeitende gegnerische Radargeräte erfasst werden, so dass das Boot rechtzeitig auf Tiefe gehen konnte. Die Frequenz des ohne Wissen der Deutschen entwickelten neuesten alliierten Radargerätes, das mit einer Wellenlänge von 3 cm = 10 GHz arbeitete, wurde jedoch nicht mehr erfasst.[5] Eine Beobachtungsmöglichkeit für höherfrequente Zentimeterwellen-Radarstrahlung bei Schnorchelfahrt war erst für Nachfolgeprojekte im Jahr 1945 vorgesehen.
Bei Seegang bis Stärke 2 (schwach bewegt, Wellenhöhe 0.1 bis 0,5 Meter) konnte das ab März 1945 eingeführte damals beste Flugzeugradar „APS-20“ einen Schorchel bis in 13 Meilen (etwa 20 km) Entfernung orten. Bei Seegang ab Stärke 3 (Schaumköpfe, Wellenhöhe 0,5 bis 1,25 Meter) war es hierfür aber nicht mehr verwendbar.
Typen
 Übergabe von U 889 an die kanadische Marine im Mai 1945. Der eingeklappte Schnorchel steuerbordseitig vor dem Turm ist auf dem Oberdeck gut zu erkennen. Unterhalb der Brücke verläuft eine der Luftleitungen
Übergabe von U 889 an die kanadische Marine im Mai 1945. Der eingeklappte Schnorchel steuerbordseitig vor dem Turm ist auf dem Oberdeck gut zu erkennen. Unterhalb der Brücke verläuft eine der LuftleitungenZum Einbau kamen vier Typen:
- Typ I: Zuluftanschluss über Flansch am Turm, Seilantrieb.
- Typ II: Zuluftanschluss über Flansch am Turm, Druckölanlage mit Kreuzkopfantrieb.
- Typ III: Zuluftanschluss am Drehzapfen des Schnorchelmastes, Druckölanlage mit Kreuzkopfantrieb.
- Typ IV: Ausschiebbarer Schnorchel im Turm mit eingebautem Zu- und Abluftleitungsanschluss (nur Typ XXI und XXIII)
Die Typen I–III wurden außerhalb des Druckkörpers liegend gelagert und zum Betrieb vor dem Turm hochgeklappt, der Typ IV wurde wie ein Sehrohr senkrecht aus dem Bootsinneren ausgefahren.
Die schwimmerbetätigten Ventile waren im Betrieb nicht störungsfrei. Ihre Funktion war abhängig vom Kurs des Bootes zur Seegangsrichtung und es gab kein Mittel gegen Vereisung. Im Winter 1944/45 erfolgten bei einigen Booten der U-Boot-Klasse II Versuche mit druckluftbetätigten Kopfventilen, die einwandfrei und schnell arbeiteten. Auch das am 5. Mai 1945 bei Kilbotn in Norwegen auf Position 68° 44′ N, 16° 35′ O68.72861666666716.576666666667 versenkte Typ VII C-Boot U 711 war mit diesem neuen Kopfventil ausgerüstet.[6]
Mit dem Schnorchel vom Tauchboot zum U-Boot
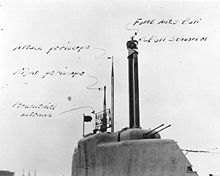 Der ausgefahrene Schnorchel mit Bali-Antenne über der Flak auf U 3008
Der ausgefahrene Schnorchel mit Bali-Antenne über der Flak auf U 3008Mit den U-Boot-Typen XXI und XXIII, die bereits serienmäßig mit einem Schnorchel ausgerüstet waren, wurde eine neue Ära des U-Boot-Krieges eingeleitet. Solche Boote brauchten theoretisch nicht mehr aufzutauchen und gelten als die ersten wirklichen U-Boote der Geschichte. Beim Typ XXI wies der Schnorchel einige Mängel auf:
- Zuluft- und Abgasrohre waren unterdimensioniert, so dass statt 4000 PS nur 2400 PS Dieselleistung zu erreichen war.
- Der Schnorchelmast zeigte zwischen 6,5 und 8,5 kn starke Schwingungen, so dass die möglichen Unterwassergeschwindigkeiten auf unter 6 kn (Ladefahrt mit Schleich-E-Motoren) und 9–10,5 kn (Unterwassermarschfahrt) begrenzt waren.
- Das Aus- und Einfahren verursachte − hauptsächlich bedingt durch den Druckluftmotor − starken Lärm (95–116 Phon)[7].
In der Folge rüsteten alle U-Boot-Marinen auf schnelle und tieftauchende U-Boote mit multiplen Aufgabenstellungen um, und diesel-elektrische U-Boote verfügen seitdem über Schnorchel.
Erläuterungen
- ↑ [1] Internetquelle zur Entwicklung des Schnorchels, ASPECTS OF SUBMARINES, Part IV: THE SUBMARINE AND THE DIESEL ENGINE. by Prof. dr ir E. van den Pol. Abgerufen am 13. August 2011
- ↑ Eberhard Rössler: U-Boottyp XXI. 5., erw. Aufl., Bernard & Graefe Verlag, Bonn 2001, ISBN 3-7637-5995-6, S. 22f.
- ↑ EMPLOYMENT OF SEARCH RADAR IN RELATIONS TO ENEMY COUNTERMEASURES
- ↑ Schornsteinfeger project, allied report on aspect of German Stealth technology 1944/45
- ↑ Clay Blair: U-Boot Krieg 1942 - 1945, 2004, ISBN 3-8289-0512-9, S.619
- ↑ Blaue Bohnen am Polarkreis. taucher.net. Abgerufen am 10. Juli 2011.
- ↑ Eberhard Rössler: U-Boottyp XXIII. 2. erweiterte Auflage. Bernard & Graefe Verlag, Bonn 2001, ISBN 3-7637-5995-6, S.168.
Literatur
- Fritz Köhl, Axel Niestle: Vom Original zum Modell: Uboottyp VII C. Eine Bild- und Plandokumentation. Bernard & Graefe Verlag, Bonn 1994, ISBN 3-7637-6002-4. S. 35f.
- Eberhard Rössler: U-Boottyp XXI. 4.,5.,7. Aufl., Bernard & Graefe Verlag, Bonn 1986, 2001, 2008, ISBN 3-7637-5806-2, ISBN 3-7637-5995-6, ISBN 978-3-7637-6218-7.
- Ulrich Gabler: Unterseebootbau. Bernard & Graefe Verlag, Koblenz 1987, ISBN 3-7637-5286-2.
- Richard Lakowski: U-BOOTE. Militärverlag der deutschen demokratischen Republik, 1. Auflage 1985
- Blair, Clay: U-Boot-Krieg. Lizenzausgabe für Bechtermünz Verlag im Weltbild Verlag GmbH, Augsburg 2004, ISBN 3-8289-0512-9
Weblinks
- Deutsche Ortungs- und Nachrichtentechnik – Originaldokumente
- Besprechungsprotokoll zu einer AGR-Sitzung am 26. April 1944 (PDF-Datei)
- EMPLOYMENT OF SEARCH RADAR IN RELATIONS TO ENEMY COUNTERMEASURES – Originaldokumente (englisch) u.a. mit statistischen Angaben zur Radarortung der deutschen U-Boot-Schnorchel


Wikimedia Foundation.