- Schrittmotor
-
 Schrittmotor mit Permanentmagnet
Schrittmotor mit Permanentmagnet
Ein Schrittmotor ist ein Synchronmotor, bei dem der Rotor (drehbares Motorteil mit Welle) durch ein gesteuertes schrittweise rotierendes elektromagnetisches Feld der Statorspulen (nicht drehbarer Motorteil) um einen minimalen Winkel (Schritt) oder sein Vielfaches gedreht werden kann. Schrittmotoren existieren auch in Form von Linearmotoren.
Inhaltsverzeichnis
Positionierung
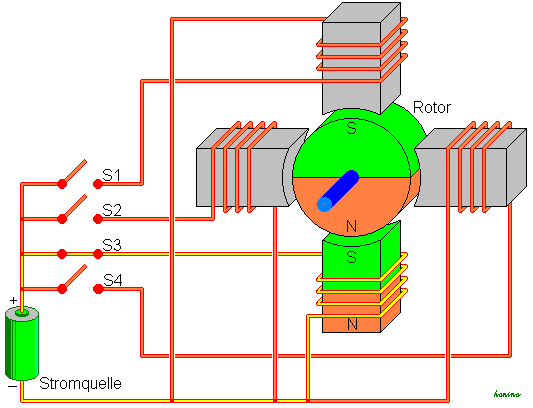
 Schema eines Schrittmotors mit vier Schritten für eine Umdrehung (und unipolarer Beschaltung)
Schema eines Schrittmotors mit vier Schritten für eine Umdrehung (und unipolarer Beschaltung) Animation mit Reluktanzschrittmotor
Animation mit ReluktanzschrittmotorSchrittmotoren folgen im Prinzip exakt dem außen angelegten Feld und können im Prinzip ohne Sensoren zur Positionsrückmeldung (Encoder, Drehgeber oder ähnliches) genau betrieben werden. Sie zeigen damit ein ähnliches Verhalten wie Synchronmotoren, weisen aber in der Regel eine deutlich höhere Polpaarzahl auf. Daher können sie einfacher betrieben werden als beispielsweise Servomotoren (i. d. R. Gleichstrom- oder Synchronmotoren mit Positionsgeber), welche auf die gewünschte Position eingeregelt werden müssen. Für einen besonders homogenen Verlauf werden Schrittmotoren mit einem gleichförmigen Drehfeld angesteuert.
Schrittverlust
Wird ein Schrittmotor jedoch durch ein externes Lastmoment oder durch die anzutreibende Masse beim starken Beschleunigen beziehungsweise Verzögern überlastet (d. h. Lastmoment > Motormoment), kann der Rotor dem Drehfeld nicht mehr folgen. Es werden Schritte übersprungen und die Information über die aktuelle Position des Rotors geht verloren. Bei diesem sogenannten Schrittverlust springt der Motor in die vorherige oder nächste Position gleicher Phase zurück. Durch die mechanische Bewegungsenergie (Trägheit) kommt es bei rasch bewegten Magnetfeldern meist zu einer Serie von verlorenen Schritten. Auftretende Schrittverluste summieren sich und führen dann zu einer ungenauen Positionierung.
Dies kann folgendermaßen verhindert werden.
- Einen Positionsgeber (Tacho) misst die genaue Drehlage. Die Ansteuerung (Regler) kann sofort nachkorrigieren. Der Motor kann bis zur Leistungsgrenze belastet werden.
- Die Ansteuerung misst den Strom bei jedem Schritt. Wird der Motor immer etwas unter der Lastgrenze betrieben (und ansonsten mit Störmeldung abgeschaltet), kann auf einen Positionsgeber verzichtet werden.[1].
- Bei zyklischen Bewegungen oder Rotationsbewegungen kann die Position des Motors bei jeder Umdrehung oder Zyklus mit einem externen Positionsimpuls eines Sensors mit der Grundstellung abgeglichen werden.
- Die Überlastung wird verhindert.
Sanftes Anfahren und Verzögern ist für höhere Geschwindigkeiten in jedem Fall zu empfehlen, um Schrittverlust zu vermeiden. Ist nur die Geschwindigkeit wichtig, nicht die Position, kann Schrittverlust in Kauf genommen werden.
Bauformen
 Zweiphasiger Hybridschrittmotor mit vier Wicklungen in Schnittdarstellung
Zweiphasiger Hybridschrittmotor mit vier Wicklungen in Schnittdarstellung Zweiphasiger Hybridschrittmotor mit acht Wicklungen und ausgebautem Rotor
Zweiphasiger Hybridschrittmotor mit acht Wicklungen und ausgebautem RotorMan unterscheidet den Schrittmotor nach seiner Bauform in:
- Reluktanzschrittmotor
- Permanentmagnetschrittmotor
- Hybridschrittmotor
- Lavet-Schrittmotor, Einphasen-Schrittmotor für mechanische Anzeigen wie den Antrieb der Zeiger in Quarzuhren.
Beim Reluktanzschrittmotor besteht der Rotor aus einem gezahnten Weicheisenkern. Bei diesem Material verschwindet nach dem Ausschalten des Statorstromes das Magnetfeld. Bei eingeschaltetem Strom fließt der magnetische Fluss durch den Weicheisenkern des Rotors. Die Drehbewegung des Rotors kommt zustande, weil vom gezahnten Stator der nächstliegende Zahn des Rotors angezogen wird, da sich so der magnetische Widerstand verringert.
Beim Permanentmagnetschrittmotor besteht der Stator aus Weicheisen und der Rotor aus Dauermagneten, die abwechselnd einen Nord- und einen Südpol aufweisen. Mit dem Stator-Magnetfeld richtet man den dauermagnetischen Rotor so aus, dass eine Drehbewegung entsteht.
Da der Reluktanzschrittmotor keine Permanentmagnete enthält, hat er daher im Gegensatz zum Permanentmagnetschrittmotor auch kein Rastmoment bei ausgeschaltetem Strom. Beim Permanentmagnetschrittmotor ist die Anzahl der Pole (und damit die Auflösung) begrenzt.
Der Hybridschrittmotor vereint die positiven Eigenschaften beider Bauformen durch feine Schrittteilung und gutes Drehmoment. In dieser Bauweise wird als Rotor ein Permanentmagnet mit zwei gezahnten Weicheisenkränzen an den Polen eingesetzt. Die zwei Zahnkränze sind jeweils um einen halben Schritt versetzt und bilden einen Polschuh. Technisch handelt es sich damit um eine spezielle Bauform eines Permanentmagnetmotors und erinnert lediglich durch seinen gezahnten Weicheisenrotor an Reluktanzmotoren. Nahezu alle heute erhältlichen Schrittmotoren sind Hybridmotoren.
Als High-Torque Motoren (= hohes Drehmoment) werden häufig Typen bezeichnet, bei denen für den Rotor besonders starke Seltenerdenmagnete verwendet werden. So lässt sich eine besonders hohe Kraftdichte erzielen.
Kenngrößen
Die Kenngrößen eines Schrittmotors sind:
- der Schrittwinkel (bzw. Schrittweg beim Linearmotor) , das heißt der Winkel φ0 für einen Vollschritt. Ein Vollschritt tritt bei der Umschaltung des Stromes von einer Wicklung auf die nächste auf.
- die Anzahl der Phasen (zumeist 2)
- die Schrittanzahl n pro Umdrehung mit
- n = 360° / φ0
- Die Schrittanzahl pro Umdrehung ist bei zweiphasigen Schrittmotoren ein Vielfaches von 4, da sich nach 4 Schritten wieder die gleichen Zähne mit gleicher Polarität gegenüberstehen. Bei Linearmotoren entsprechend Schritte für den Gesamtstellweg.
- der maximale Strangstrom I; er ergibt sich aus der maximal zulässigen thermischen Belastung I2R. Er kann kurzzeitig höher sein, um ein höheres Drehmoment zu erreichen.
- der ohmsche Spulenwiderstand R
- die Spuleninduktivität L; sie ist wichtig für die Dynamik des Motors und die Dimensionierung der Freilaufdioden.
- das Drehmoment im Stand (Haltemoment) für einen gegebenen Strom sowie der Drehmomentverlauf mit steigender Drehzahl; sie sind abhängig vom Quadrat des Strangstromes und der Verlauf ist von der Treiberschaltung und deren Speisespannung abhängig.
- die Wicklungsanschlussgestaltung (ohne Mittelanzapfung, mit Mittelanzapfung, mit gemeinsamer Mittelanzapfung)
Weiterhin hat das Trägheitsmoment des Läufers eine Bedeutung – es bildet in vielen Anwendungen den Hauptanteil der Massenträgheit und bestimmt somit die Dynamik.
Die Effizienz von Schrittmotoren ist hingegen von untergeordneter Bedeutung, da die Antriebsleistung für die typische Anwendung als Positionierantrieb unwichtig ist. Man nimmt oft eine geringe Effizienz in Kauf, die beispielsweise durch eine geringe Läuferträgheit bedingt ist, um damit hohe Dynamik zu erreichen.
Elektronische Schrittteilung
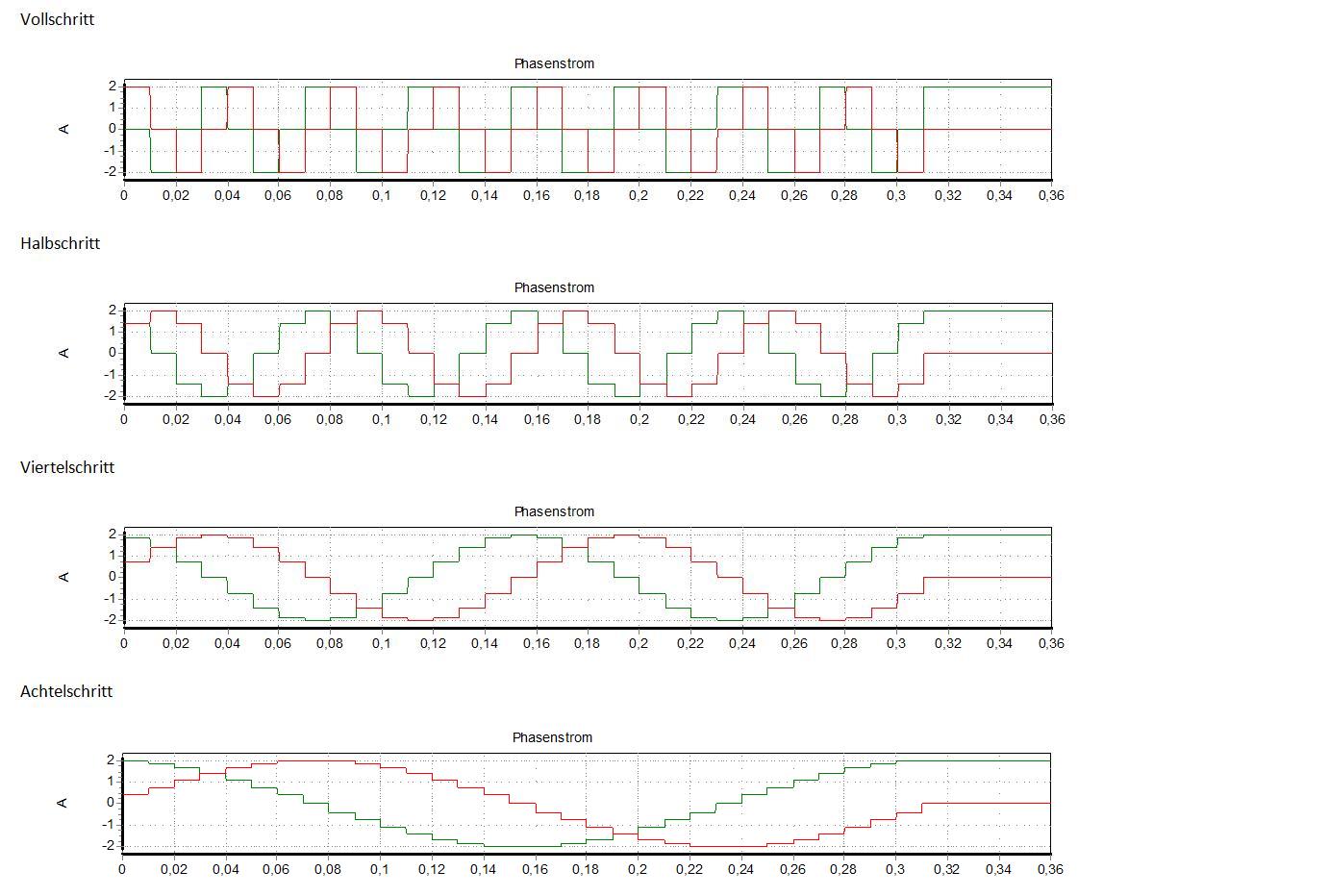
 Elektronische Ansteuerung eines Schrittmotors
Elektronische Ansteuerung eines SchrittmotorsUm bei einem Schrittmotor den Schrittwinkel zu verkleinern, gibt es die Möglichkeit der elektronischen Schrittteilung. Dabei werden zwei aufeinanderfolgende Phasen nicht nur an- bzw. ausgeschaltet, sondern in bestimmten Stufen. Es ergeben sich dadurch zwei gestufte Sinus-Funktionen. Durch das Verhältnis der beiden Amplituden zueinander ergeben sich Schritte zwischen den Vollschritten.
Der entstehende Schrittwinkel ergibt sich aus:
φst = φ0 / st
st ist der elektronische Teilungsfaktor. st = 2 – Halbschrittbetrieb, st = 4 – Viertelschrittbetrieb, st = 8 – Achtelschrittbetrieb, ...
Die Schrittteilung, meist als Mikroschrittbetrieb bezeichnet, bringt höhere Laufruhe (gleichmäßigeres Drehmoment) und kann im Rahmen der Fertigungsgenauigkeit und der Feldgestalt eine höhere Winkelauflösung liefern.
Drehzahl und Drehmoment
 Zu- und Abschaltvorgang an einer realen Spule (RDraht = 10 Ω) mit „idealer“ Freilaufdiode; oben: Selbstinduktionsspannung, Mitte: Strom, unten: Speisespannung; die Zeitachse ist in auf die Zeitkonstante normierten Einheiten skaliert
Zu- und Abschaltvorgang an einer realen Spule (RDraht = 10 Ω) mit „idealer“ Freilaufdiode; oben: Selbstinduktionsspannung, Mitte: Strom, unten: Speisespannung; die Zeitachse ist in auf die Zeitkonstante normierten Einheiten skaliertEin effektiver Betrieb von Schrittmotoren erfordert hohe Stromanstiegs- und -abfallgeschwindigkeiten. Spulen mit Eisenkern, also hoher Induktivität L, setzen dem ihre Induktivität entgegen (siehe Bild). Um die Wärmeentwicklung in den Spulen erträglich zu halten, sind für Schrittmotoren maximale Phasenströme angegeben (ohmsche Verlustwärme). Um ein schnelles Anwachsen der Spulenströme nach dem Zuschalten der Wicklung zu erreichen, sind hohe Betriebsspannungen und geringe Windungszahlen (Induktivitäten) erforderlich. Um ein schnelleres Absinken des Stromes nach dem Abschalten zu erreichen, ist der bipolare Betrieb besser geeignet – bei diesem werden die Spulen(paare) mit einer H-Brücke in beiden Stromrichtungen abwechselnd betrieben und die in der Induktivität gespeicherte Energie kann über gegen die Betriebsspannung arbeitende Freilaufdioden dorthin zurückgeführt werden (siehe auch Spule (Elektrotechnik)).
Unipolar betreibbare Motoren besitzen einen Mittelabgriff der Spulenpaare und können mit einseitig schaltenden Transistoren betrieben werden. Sie besitzen wegen der notwendig langsameren Entmagnetisierung schlechtere dynamische Eigenschaften, sind weniger effektiv und sind inzwischen weniger gebräuchlich (Siehe auch Beschaltung).
Heutige Schaltungen (oft Integrierte Schaltungen) zum hochdynamischen Betrieb von bipolaren Schrittmotoren arbeiten im Chopperbetrieb; sie regeln wie ein Schaltregler während jedes Schrittes den Spulenstrom und können niederohmige Wicklungen (geringe Induktivität) an hohen Betriebsspannungen betreiben, sodass Stromanstieg und -abfall schnell sind.
Das Drehmoment eines Schrittmotors ist proportional zum Strangstrom, die Verlustleistung steigt jedoch mit dem Quadrat des Strangstromes. Schrittmotoren sind daher nur kurzzeitig überlastbar, um das Drehmoment über den Nennwert zu steigern.
Der Drehmomentverlauf besitzt im Stand sein Maximum und sinkt bei hohen Drehzahlen ab. Charakteristisch ist eine Start-Stopp-Frequenz, unterhalb der der Motor bei einem bestimmten Strangstromwert oder einer bestimmten Spulenspannung den elektrischen Schritten auch dann zu folgen vermag, wenn ein Frequenzsprung von oder auf null vorliegt.
Um keinen Schrittverlust zu erleiden, muss die Schrittfrequenz zur Drehzahlerhöhung mindestens ab der Start-Stopp-Frequenz eine Rampe fahren (Hochlauf und Bremsen). Die maximale Drehzahl und das Drehmoment werden durch möglichst niederinduktive/niederohmige Wicklungen und eine möglichst hohe Betriebsspannung verbessert. Um die Ohmschen Verluste in den Wicklungen zu verringern, werden die Strangströme oft derart geregelt, dass sie im Stand oder bei gleichförmiger Bewegung abgesenkt werden.
Die meisten Schrittmotoren sind zweiphasig, es gibt jedoch auch drei- und mehrphasige Motoren. Mehr als zwei Phasen liefern ein gleichmäßigeres Drehmoment und neigen daher auch weniger zu sich aufbauenden Resonanzschwingungen des Läufers.
Beschaltung
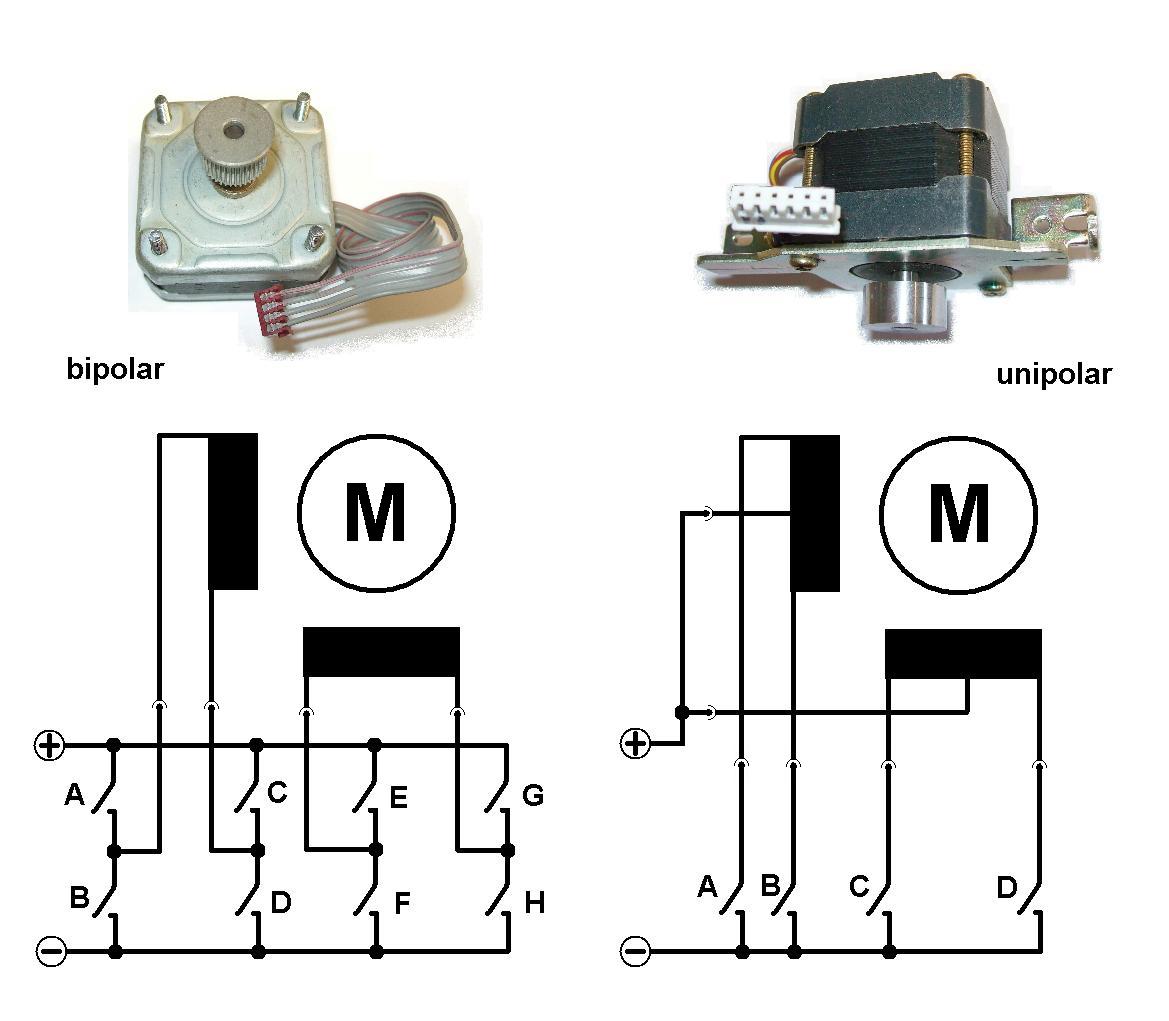
 Schrittmotor-Schaltungsvarianten
Schrittmotor-SchaltungsvariantenSchrittmotoren werden immer zusammen mit elektronischen Schaltern betrieben – nur zu Test- und Demonstrationszwecken können auch mechanische Taster oder Schalter verwendet werden. Elektronische Schrittmotorcontroller erzeugen aus je einem digitalen Takt- und Richtungssignal die nötige Phasenabfolge (Sequenz), um ein Drehfeld zu erzeugen. Schrittmotortreiber verstärken diese digitalen Signale und schalten die Betriebsspannung des Motors. Die Leiterplatte mit der Leistungsbaugruppe befindet sich meist nahe am Motor, um Kabelinduktivitäten und Störemissionen gering zu halten. Bei Stromsteuerung wird zusätzlich der Strangstrom gemessen und entsprechend dem Vorgabewert geregelt. Dieser kann bei Stillstand oder Beschleunigung/Bremsen unterschiedlich sein.
Bei früher üblichen unipolaren Motoren wurde oft auf eine Stromregelung verzichtet – solche Motoren besitzen daher oft höherohmige Wicklungen. Mit einer Choppersteuerung betriebene bipolare Motoren sind dagegen niederohmig; der Strom wird mit einem Hysterese-Schaltregler für jeden Teilschritt geregelt, indem der Spulenstrom sehr schnell an- und abgeschaltet wird (Chopperfrequenz mehrere 10 kHz). Die Spuleninduktivität bewirkt einen mit dieser Frequenz an- und abschwellenden Stromverlauf – sie senkt die für hohe Drehzahlen erforderliche Stromänderungsgeschwindigkeit und muss daher für hohe Dynamik gering sein.
Aus dem gleichen Grund ist die Betriebsspannung solcher hochdynamischer Antriebe wesentlich höher als die Nennspannung der Spulen – in diesen zirkuliert ein im Vergleich zur Gesamtstromaufnahme der Treiberschaltung wesentlich höherer Strom.Aufgrund des Schaltbetriebes sind die Verlustleistungen in der Elektronik derart gering, dass alle Funktionen einschließlich der Transistorschalter bis zu Leistungen von etwa 30 Watt in einem einzigen SMD-Schaltkreis ohne Kühlkörper untergebracht werden können. Beispielhaft genannt seien L298P, L6219DS, UC3717AQ und A4983.
Schrittmotoren mit abweichender Phasenzahl oder Spulenanschlussgestaltung können nicht an einer gegebenen Ansteuerschaltung betrieben werden. Ausnahme sind Schrittmotoren mit getrennten Mittelanzapfungen, diese können an (heute üblichen) Vollbrücken-Treibern für Einzelspulen betrieben werden. Ggf. ist der Maximalstromfluss neu einzustellen (Messwiderstand).
Genauigkeit
Aufgrund der hohen Polpaarzahl bewegt sich der Rotor eines Schrittmotors mit jedem von außen vorgegebenen Schritt nur mit einem geringen Winkelversatz vorwärts. Üblich sind 24 bis 200 Schritte pro Umdrehung. Eine Polpaarzahl von 50 ergibt im Vollschrittbetrieb 200 Schritte je Umdrehung, also 1,8° Vollschrittwinkel. Durch Mikroschrittbetrieb ist ein Auflösungsvermögen von unter 0,1 Grad erreichbar. Die Schrittgenauigkeit liegt meist im Bereich von einigen Prozent.
Anwendungsgebiete
 Doppel-Schrittmotor für Zeigerinstrumente (Kombiinstrument), Bildbreite ca. 12 cm
Doppel-Schrittmotor für Zeigerinstrumente (Kombiinstrument), Bildbreite ca. 12 cmTypische Anwendungsgebiete sind Drucker, vor allem Matrixdrucker, oder der Antrieb des Schreib-/Lesekopfes in einem Diskettenlaufwerk. Aufgrund ihrer hohen Genauigkeit werden sie auch in computergesteuerten Werkzeugmaschinen zur Positionierung der Werkzeuge verwendet. Durch die ständig sinkenden Kosten für die Ansteuerelektronik werden sie auch zunehmend im Konsumgüterbereich verwendet. So sind in Kraftfahrzeugen der mittleren und gehobenen Kategorie heute bis über 50 Schrittmotoren im Einsatz, die Betätigung der vielen Klappen einer automatischen Heizungs- und Klimaanlage ist dafür ein Beispiel.
Der nebenstehend abgebildete Doppel-Schrittmotor ist für den Einsatz in einem Kombiinstrument gedacht und kann zwei Zeiger auf einer Welle bedienen, wie Stunden- und Minutenzeiger auf einer Uhr. Der teilweise demontierte linke Motor wirkt auf die Hohlwelle aus Kunststoff, der rechte auf die Stahlwelle.
Schrittmotoren können bis ungefähr 1 kW wirtschaftlich eingesetzt werden.
Literatur
- Günter Springer: Fachkunde Elektrotechnik. 18.Auflage, Verlag Europa-Lehrmittel, Wuppertal, 1989, ISBN 3-8085-3018-9
- Gregor D. Häberle, Heinz O. Häberle: Transformatoren und Elektrische Maschinen in Anlagen der Energietechnik. 2. Auflage, Verlag Europa-Lehrmittel, Haan-Gruiten, 1990, ISBN 3-8085-5002-3
- Gerd Fehmel, Horst Flachmann, Otto Mai: Die Meisterprüfung Elektrische Maschinen. 12. Auflage, Vogel Buchverlag, Oldenburg und Würzburg, 2000, ISBN 3-8023-1795-5
Weblinks
- Gute Funktionsbeschreibung und Praxistipps
- Alles über den Schrittmotor
- Animierte Darstellung eines Schrittmotors
- Englischsprachige Einführung zum Schrittmotor
- Doku mit Animationen über Schrittmotoren mit einfacher Mikrocontroller-Steuerung für Demo
Einzelnachweise
- ↑ Fa. Beckhoff, Application Note DK9221-0210-0014: Schrittmotor, Abschnitt Allgemeines zu Schrittmotoren






Wikimedia Foundation.