- Turingmaschine
-
Die Turingmaschine ist ein von dem britischen Mathematiker Alan Turing 1936 entwickeltes Modell, um eine Klasse von berechenbaren Funktionen zu bilden. Sie gehört zu den grundlegenden Konzepten der Theoretischen Informatik.
Das Modell wurde im Rahmen des von David Hilbert im Jahr 1920 formulierten Hilbertprogramms, speziell zur Lösung des so genannten Entscheidungsproblems, in der Schrift “On Computable Numbers, with an Application to the Entscheidungsproblem” vorgestellt. Alan Turing beabsichtigte, mit der Turingmaschine ein Modell des mathematisch arbeitenden Menschen zu schaffen und damit eine mathematische Definition des Begriffs „Algorithmus“ zu formulieren.
Inhaltsverzeichnis
Bedeutung in der Informatik
Das von David Hilbert aufgestellte Entscheidungsproblem fragt, ob eine Formel der Prädikatenlogik allgemeingültig ist, also ob eine mathematische Aussage gültig ist oder nicht. Das von ihm vorgeschlagene Hilbertprogramm versuchte, dieses Problem automatisch zu lösen. Die Methode, die für eine prädikatenlogische Formel bestimmt, ob sie allgemeingültig ist, soll also von einer “Maschine” durchgeführt werden können. Vor der Erfindung des Computers bedeutete dies, dass ein Mensch nach festen Regeln – einem Algorithmus – eine Berechnung durchführt.
Turing gelang es mit seinem Modell, die Begriffe des Algorithmus und der Berechenbarkeit mathematisch zu fassen. Die Behauptung, dass eine Funktion genau dann berechenbar ist, wenn es eine Turingmaschine gibt, die sie berechnet, wird Church-Turing-These genannt und gilt gemeinhin als gültig. Ein starker Beleg dafür ist u.a. die mathematische Äquivalenz dieses Modells mit anderen Berechenbarkeits-Modellen (wie zum Beispiel dem Lambda-Kalkül und partiell-rekursive Funktionen) oder heutigen Computern. Das Besondere an einer Turingmaschine ist dabei ihre strukturelle Einfachheit. Sie benötigt nur drei Operationen (Lesen, Schreiben und Schreib-Lese-Kopf bewegen), um alle Operationen der üblichen Computerprogramme zu simulieren. Im Rahmen der theoretischen Informatik eignet sie sich deshalb besonders bei Beweisen von algorithmischen Problemen.
Eine Turingmaschine ist praktisch viel ineffizienter als reale Computer, eine reale Implementierung von Algorithmen ist also nicht sinnvoll, die Simulation anderer Maschinenmodelle benötigt aber nur polynomiellen Mehraufwand im Sinne der O-Notation. In der Komplexitätstheorie wird deshalb üblicherweise die Turingmaschine als Maschinenmodell verwendet, um die Schwierigkeit von algorithmischen Problemen zu vergleichen.
Nicht alle mathematischen Funktionen können von einer Turingmaschine berechnet werden. So konnte Turing zeigen, dass eine Turingmaschine das Entscheidungsproblem nicht lösen kann, genau wie das Halteproblem. Auf Basis der Church-Turing-These gilt dies auch für alle anderen Maschinenmodelle. Ebenfalls unentscheidbar ist nach dem Satz von Rice jedwede nicht-triviale Eigenschaft eines Programms in einer turingmächtigen Programmiersprache. Die Berechenbarkeitstheorie beschäftigt sich mit der Frage, welche Probleme prinzipiell von Maschinen gelöst werden können.
Systeme, Computer bzw. Programmsprachen, die unter der Annahme, dass sie über einen unendlich großen Speicher verfügen können, eine Turingmaschine emulieren können, werden als turingmächtig bezeichnet.
Informelle Beschreibung
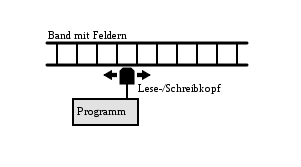 Ein-Band-Turingmaschine
Ein-Band-Turingmaschine Animierte Turingmaschine
Animierte Turingmaschine
Die Turingmaschine besteht aus
- einem unendlich langen Speicherband mit unendlich vielen sequentiell angeordneten Feldern. In jedem dieser Felder ist zu jedem Zeitpunkt genau ein Zeichen gespeichert. Dabei ist als Zeichen ein Blanksymbol zugelassen, was so viel bedeutet wie „leeres Feld“. Das Blanksymbol gehört nicht zu der Menge der Eingabezeichen. Man darf sich das unendlich lange Band auch als ein endliches vorstellen, es muss jedoch lang genug sein, um die aktuelle Berechnung ungehindert ausführen zu können, d. h. der Lese- und Schreibkopf darf nicht an das Ende stoßen.
- einem programmgesteuerten Lese- und Schreibkopf, der sich auf dem Speicherband feldweise bewegen und die Zeichen verändern kann.
Die Turingmaschine modifiziert die Eingabe auf dem Band nach einem gegebenen Programm. Die Startposition der Turingmaschine ist am Anfang des Eingabeworts, d. h. an der Position des ersten Eingabezeichens.
Mit jedem Schritt liest der Lese-Schreib-Kopf das aktuelle Zeichen, überschreibt dieses mit einem anderen (oder dem gleichen) Zeichen und bewegt sich dann ein Feld nach links oder rechts oder bleibt stehen. Welches Zeichen geschrieben wird und welche Bewegung ausgeführt wird, hängt von dem an der aktuellen Position vorgefundenen Zeichen sowie dem Zustand ab, in dem sich die Turingmaschine gerade befindet. Dies wird durch eine zu der Turingmaschine gehörende Funktion definiert. Zu Beginn befindet sich die Turingmaschine in einem vorgegebenen Startzustand und geht bei jedem Schritt in einen neuen Zustand über. Ein Zustand kann mehrere Male durchlaufen werden, er sagt nichts über die auf dem Band vorliegenden Zeichen aus.
Man kann bestimmte Zustände der Turingmaschine als Endzustände definieren. Sobald die Maschine in einen dieser Zustände kommt, bleibt sie stehen, unabhängig davon, welches Zeichen sich an der aktuellen Position befindet. Es gibt Eingaben, für die eine Turingmaschine niemals stoppt.
Die Turingmaschine wird (wie viele andere Automaten) auch für Entscheidungsprobleme eingesetzt, also für Fragen, die mit „ja“ oder „nein“ zu beantworten sind. Hierbei werden zum Beispiel zwei Zeichen vereinbart, wobei das eine als „ja“ und das andere als „nein“ interpretiert wird. Nach dem Anhalten der Turingmaschine liegt die Antwort als eines der beiden Zeichen auf dem Ausgabeband vor. Zu beachten ist dabei, dass sich jedes Problem als Entscheidungsproblem formulieren lässt, indem man fragt, ob ein bestimmter Wert eine Lösung für ein konkretes Problem ist.
Formale Definition
Formal kann eine deterministische Turingmaschine als 7-Tupel
 dargestellt werden (siehe auch nichtdeterministische Turingmaschine).
dargestellt werden (siehe auch nichtdeterministische Turingmaschine).- Q ist die endliche Zustandsmenge
- Σ ist das Eingabealphabet
- Γ ist das endliche Bandalphabet und es gilt

 ist die (partielle) Überführungsfunktion
ist die (partielle) Überführungsfunktion ist der Anfangszustand
ist der Anfangszustand steht für das leere Feld (Blank)
steht für das leere Feld (Blank) ist der akzeptierende Zustand
ist der akzeptierende Zustand
Konfigurationen
 Konfiguration einer Turingmaschine im Zustand q1. Der Lese-Schreibkopf befindet sich über dem letzten
Konfiguration einer Turingmaschine im Zustand q1. Der Lese-Schreibkopf befindet sich über dem letzten -Symbol vor der eigentlichen Eingabe. wird hier durch 0 dargestellt.
-Symbol vor der eigentlichen Eingabe. wird hier durch 0 dargestellt.Die Konfiguration einer Turingmaschine beschreibt nicht nur den ihr eigenen momentanen Zustand
 , sondern auch die Position des Lese-Schreib-Kopfes und die gerade auf dem Band vorhandenen Symbole.
, sondern auch die Position des Lese-Schreib-Kopfes und die gerade auf dem Band vorhandenen Symbole.Die Symbole befinden sich in einem endlichen Bereich des Bandes, der von unendlich vielen leeren Symbolen umgeben ist. Es genügt deshalb, diesen Bereich zu betrachten.
Formal kann eine Konfiguration einer Turingmaschine durch eine Folge
 beschrieben werden.
beschrieben werden.X1 ist das am weitesten links stehende, nicht-leere Bandsymbol und Xn das am weitesten rechts stehende, nicht-leere Bandsymbol. Bewegt sich der Lese-Schreib-Kopf über den Rand hinaus, sind der Konfiguration noch weitere
-Symbole hinzuzufügen.Der Lese-Schreibkopf befindet sich über dem Zeichen Xi, seine Position lässt sich also auch kurz mit i notieren. Diese Position ist dadurch gekennzeichnet, dass
, der Zustand der Turingmaschine, in der Konfiguration vor dem Symbol Xi steht.Durch eine Startkonfiguration wird das Eingabewort festgelegt. Eine übliche Startkonfiguration ist
 mit Startzustand q0 und Eingabewort
mit Startzustand q0 und Eingabewort  .
.Berechnung
Die Überführungsfunktion δ gibt zu einer Startkonfiguration den Ablauf einer Turingmaschine vor. Sie wechselt in einem Schritt von der aktuellen Konfiguration in die Nachfolgekonfiguration. Ein solcher Schritt von Konfiguration c1 zu Konfiguration c2 kann als
 dargestellt werden.
dargestellt werden.Schreibt die Überführungsfunktion für einen Zustand q und das Eingabesymbol Xi zum Beispiel vor, dass Y geschrieben wird, der Lese-Schreibkopf sich nach links bewegt und der Nachfolgezustand p ist, so bedeutet dies folgenden Schritt:
 .
.Die Berechnung einer Turingmaschine ist eine endliche oder unendliche Folge von Konfigurationsschritten. Eine Turingmaschine akzeptiert ein durch die Startkonfiguration gegebenes Wort, wenn die Berechnung in dieser Startkonfiguration beginnt und in einer Konfiguration endet, in der die Turingmaschine im Zustand qf ist. Endet die Berechnung in einer anderen Konfiguration, verwirft die Turingmaschine das Eingabewort. Ist die Berechnung der Turingmaschine unendlich, wird das Wort weder akzeptiert noch verworfen.
Intuition
Die Turingmaschine führt eine Berechnung aus, indem sie schrittweise eine Eingabe in eine Ausgabe umwandelt. Ein-, Ausgabe und Zwischenergebnisse werden auf dem unendlich langen Band gespeichert.
Zu Beginn steht ein Wort als Eingabe auf dem Band (pro Bandfeld ein Zeichen des Eingabewortes), der Rest des Bandes besteht aus leeren Feldern
. Der Lese-Schreib-Kopf steht auf dem ersten Zeichen der Eingabe und die Turingmaschine befindet sich im Startzustand q0.Die Überführungsfunktion gibt an, wie die Turingmaschine schrittweise den Bandinhalt liest und beschreibt, ihren Zustand wechselt und die Position des Lese-Schreib-Kopfes ändert. Diese Funktion nimmt als Argument den aktuellen Zustand und das Zeichen, das sich in der aktuellen Konfiguration unter dem Lese-Schreib-Kopf befindet. Als Ergebnis liefert sie dann genau einen Zustand (dieser wird zum Nachfolgezustand der Turingmaschine), ein Zeichen (mit diesem wird der Inhalt des Feldes, auf welches der Lese-Schreib-Kopf weist, überschrieben) und entweder das Symbol L (in diesem Fall bewegt sich der Lese-Schreib-Kopf um ein Feld nach links), R (in diesem Fall bewegt er sich ein Feld nach rechts) oder 0 (dann verharrt er auf demselben Feld). Damit hat die Turingmaschine einen Schritt ihres Arbeitszyklus durchlaufen und steht für einen weiteren bereit.
Da die Überführungsfunktion partiell ist, muss sie nicht für jeden Zustand und jedes Eingabezeichen einen Übergang definieren. Der Endzustand hat beispielsweise für kein Eingabezeichen einen Nachfolgezustand. Erreicht die Turingmaschine den Endzustand qf, kann die Turingmaschine deshalb keine weiteren Aktionen durchführen, und die Berechnung ist beendet. Die Ausgabe ist dann der Inhalt des Bandes (wobei die Felder, die mit Symbolen aus
 gefüllt sind, insbesondere dem Symbol , nicht berücksichtigt werden).
gefüllt sind, insbesondere dem Symbol , nicht berücksichtigt werden).Je nach Bandalphabet können Ein-/Ausgaben und Zwischenspeicherungen unterschiedlich kenntlich gemacht werden.
Beispiel
Die folgende deterministische Ein-Band-Turingmaschine M erwartet eine Folge von Einsen als Eingabe auf dem Band. Sie verdoppelt die Anzahl der Einsen, wobei ein Leersymbol in der Mitte stehen bleibt. Aus „111“ wird beispielsweise die Zeichenfolge „1110111“. Der Schreib-/Lesekopf befindet sich initial auf der ersten Eins. Der Anfangszustand ist s1, der Endzustand s6. Die Null steht für das leere Feld und das Band ist bis auf die darauf geschriebenen Einsen mit leeren Feldern gefüllt.
M = (Q,Σ,Γ,δ,s1,0,F)
- Q = {s1,s2,s3,s4,s5,s6}
- Σ = {1}
- Γ = {1,0}
- F = {s6}
Die Überführungsfunktion δ ist wie folgt definiert:
aktueller
Zustandgeles.
Symbolschr.
Symbolneuer
ZustandKopf-
richtungs1 1 → 0 s2 R s1 0 → 0 s6 0 s2 1 → 1 s2 R s2 0 → 0 s3 R s3 1 → 1 s3 R s3 0 → 1 s4 L s4 1 → 1 s4 L s4 0 → 0 s5 L s5 1 → 1 s5 L s5 0 → 1 s1 R M durchläuft zum Beispiel bei der Eingabe „11“ folgende Zustände, wobei die aktuelle Kopfposition fett gedruckt ist:
Schritt Zust. Band 1 s1 11000 2 s2 01000 3 s2 01000 4 s3 01000 5 s4 01010 6 s5 01010 7 s5 01010 8 s1 11010 Schritt Zust. Band 9 s2 10010 10 s3 10010 11 s3 10010 12 s4 10011 13 s4 10011 14 s5 10011 15 s1 11011 16 s6 -halt- Die Berechnung beginnt im Anfangszustand s1. Hier wird die erste Eins durch ein leeres Feld ersetzt, der Schreib-Lese-Kopf bewegt sich nach rechts und neuer Zustand wird s2. Der Kopf wandert nun solange nach rechts, bis ein leeres Feld gelesen wird. Danach gelangt die Turingmaschine in den Zustand s3 und überliest alle weiteren Einsen, bis sie erneut ein leeres Feld findet. Dieses wird dann durch eine Eins ersetzt. Im Zustand s4 bewegt sich der Kopf zurück, überliest wieder alle Einsen, bis er auf ein leeres Feld trifft, Zustandswechsel auf s5. Der Kopf bewegt sich nun solange nach links, bis das ursprünglich in Zustand s1 geschriebene leere Feld gefunden wird. Dieses wird wieder durch eine Eins ersetzt, der Kopf bewegt sich ein Feld nach rechts und die Turingmaschine gelangt wieder in den Zustand s1. Hier beginnt ein neuer Rechenzyklus.
Wird im Zustand s1 ein leeres Feld gelesen, so gelangt die Turingmaschine M in den Endzustand s6, woraufhin die Berechnung beendet wird.Variationen des Turingmaschinen-Modells
Überblick über Variationsmöglichkeiten
In der Literatur findet man zahlreiche unterschiedliche Definitionen der Turingmaschine, die sich jeweils in einigen Details unterscheiden. So variiert etwa die Anzahl der Bänder, das verwendete Bandalphabet, die zusätzlich verwendeten Spezialzeichen und andere Eigenschaften. Die Vielfalt ist theoretisch durch die These von Church gerechtfertigt, welche im Hinblick auf die Berechenbarkeit die Äquivalenz aller universellen Maschinenmodelle postuliert. Selbst komplexitätstheoretisch sind die Unterschiede zwischen verschiedenen Definitionen weitgehend zu vernachlässigen. So lässt sich etwa jede f(n)-zeitbeschränkte k-Bandmaschine mit beliebig großem k durch eine nur O(f²(n))-zeitbeschränkte 1-Bandmaschine simulieren. Für die Simulation beliebig vieler Bänder kommt es also zu einem maximal quadratischen Mehraufwand. Insgesamt führen alle Arten von Variationen zu nicht mehr als polynomialen Aufwandsunterschieden (wobei Aufwand hier eine beliebige Ressource meint) und sind daher für viele komplexitätstheoretische Untersuchungen vernachlässigbar. Man passt in Abhängigkeit von den Zielen der jeweiligen Analyse das verwendete Modell so an, dass die Analyse möglichst einfach durchgeführt werden kann. Folgende Beispiele zeigen Anwendungen und Variationen des Turingmaschinen-Modells.
Universelle Turingmaschine
In der obigen Definition ist das Programm fest in die Maschine eingebaut und kann nicht verändert werden. Man kann eine universelle Turingmaschine konstruieren, welche die Kodierung einer Turingmaschine als Teil ihrer Eingabe nimmt und das Verhalten der kodierten Turingmaschine auf der ebenfalls gegebenen Eingabe simuliert. Aus der Existenz einer solchen universellen Turingmaschine folgt zum Beispiel die Unentscheidbarkeit des Halteproblems. Eine ähnliche Idee, bei der das Programm als ein Teil der veränderbaren Eingabedaten betrachtet wird, liegt auch fast allen heutigen Rechnerarchitekturen zugrunde (Von-Neumann-Architektur).
Formal ist eine universelle Turingmaschine eine Maschine UTMϕ, die eine Eingabe
 liest. Das Wort w ist hierbei eine beliebige Beschreibung einer Maschine Mw, die zu einer bestimmten Funktion mit Eingabe x die Ausgabe berechnet.
liest. Das Wort w ist hierbei eine beliebige Beschreibung einer Maschine Mw, die zu einer bestimmten Funktion mit Eingabe x die Ausgabe berechnet.  ist ein Trennzeichen zwischen Programmbeschreibung und Eingabe. UTMϕ simuliert also das Verhalten von Mw mit Hilfe der Funktionsbeschreibung w und der Eingabe x. Der Index ϕ in UTMϕ zeigt an, dass es nicht nur eine einzige universelle Turingmaschine gibt. So könnten z. B. UTM1 und UTM2 verschiedene Wörter verstehen. Das Wort w muss dabei in einer Sprache codiert sein, die die UTMϕ versteht.
ist ein Trennzeichen zwischen Programmbeschreibung und Eingabe. UTMϕ simuliert also das Verhalten von Mw mit Hilfe der Funktionsbeschreibung w und der Eingabe x. Der Index ϕ in UTMϕ zeigt an, dass es nicht nur eine einzige universelle Turingmaschine gibt. So könnten z. B. UTM1 und UTM2 verschiedene Wörter verstehen. Das Wort w muss dabei in einer Sprache codiert sein, die die UTMϕ versteht.Persistente Turingmaschine
Um interaktive Modelle (im Sinne von „Modellen mit Gedächtnis“) durch eine Turingmaschine darzustellen, ist eine Erweiterung derselben um eben dieses Gedächtnis notwendig.
Laut Definition (Goldin et al., 2003: Turing Machines, Transition Systems and Interaction) ist eine Persistente Turingmaschine (PTM) eine nichtdeterministische 3-Band-Turingmaschine mit einem Input-, einem Arbeits- und einem Output-Band. Der Input wird auf dem Arbeitsband verarbeitet und erst nach vollständiger Bearbeitung gelangen die Ergebnisse auf dem Output-Band zurück in die „Umwelt“. Danach kann ein erneuter Input aus der Umwelt verarbeitet werden. Zwischen zwei Arbeitsschritten bleiben die Inhalte des Arbeitsbandes als „Gedächtnis“ erhalten.
Ameise
Chris Langtons Ameise ist eine Turingmaschine mit zweidimensionalem Band, sehr einfachen Regeln und verblüffenden Ergebnissen.
Fleißiger Biber
Ein beliebtes Problem ist der Fleißige Biber: Man finde die Turingmaschine, die mit einer bestimmten Anzahl von Zuständen die maximale Anzahl eines bestimmten Symbols (meist „1“) auf das Band schreibt und dann anhält (d.h. eine Endlosschleife ist ausgeschlossen).
Vergessliche Turingmaschine
Eine Turingmaschine wird vergesslich[1] (oder auch bewegungsuniform[2]) genannt, falls die Kopfbewegungen nicht vom Inhalt der Eingabe abhängen, sondern nur von der Länge. Jede Turingmaschine kann durch eine vergessliche simuliert werden [3].
Beziehung zwischen einer Turingmaschine und einer formalen Sprache
Akzeptierte Sprache
Eine Turingmaschine akzeptiert eine Sprache L, wenn sie bei Eingabe eines jeden Wortes
 nach endlich vielen Schritten in einen definierten Endzustand übergeht („hält“) und bei Eingabe eines jeden Wortes
nach endlich vielen Schritten in einen definierten Endzustand übergeht („hält“) und bei Eingabe eines jeden Wortes  in einem anderen Zustand oder überhaupt nicht hält.
in einem anderen Zustand oder überhaupt nicht hält.Eine Sprache
 heißt genau dann rekursiv aufzählbar bzw. semientscheidbar (Typ 0 der Chomsky-Hierarchie), wenn es eine deterministische Turingmaschine gibt, die L akzeptiert.
heißt genau dann rekursiv aufzählbar bzw. semientscheidbar (Typ 0 der Chomsky-Hierarchie), wenn es eine deterministische Turingmaschine gibt, die L akzeptiert.Entscheidbare Sprache
Akzeptiert eine Turingmaschine eine Sprache und hält sie zusätzlich bei allen Eingaben, die nicht zu dieser Sprache gehören, so entscheidet die Turingmaschine diese Sprache.
Eine Sprache
heißt rekursiv oder entscheidbar genau dann, wenn es eine deterministische Turingmaschine gibt, die L entscheidet.Literatur
- Turing, A., On Computable Numbers, With an Application to the Entscheidungsproblem, Proceedings of the London Mathematical Society, Series 2, Volume 42, 1936; reprinted in M. David (ed.), The Undecidable, Hewlett, NY: Raven Press, 1965
- Marvin Minsky: Computation: Finite and Infinite Machines, Englewood Cliffs, N.J.: Prentice-Hall 1967
- John E. Hopcroft; Rajeev Motwani; Jeffrey D. Ullman: Introduction to Automata Theory, Languages, and Computation. 2. Auflage. Addison-Wesley, 2000, ISBN 978-0201441246.
- Juraj Hromkovič: Theoretische Informatik. Formale Sprachen, Berechenbarkeit, Komplexitätstheorie, Algorithmik, Kommunikation und Kryptographie. 3. Auflage. Teubner Verlag, Wiesbaden 2007, ISBN 978-3-8351-0043-5.
- Heinz Lüneburg: Rekursive Funktionen. Springer, Berlin 2002, ISBN 3-540-43094-6.
- Oswald Wiener, Manuel Bonik, Robert Hödicke: Eine elementare Einführung in die Theorie der Turing-Maschinen. Springer, Wien 1998, ISBN 3-211-82769-2.
- Rolf Herken: The Universal Turing Machine : A Half-Century Survey. Springer, Wien, New York, ISBN 3-211-82637-8.
- Sybille Krämer, Symbolische Maschinen. Die Idee der Formalisierung im geschichtlichen Abriß, Darmstadt: Wissenschaftliche Buchgesellschaft 1988
- B.A. Trachtenbrot: Algorithmen und Rechenautomaten, Berlin: VEB Deutscher Verlag der Wissenschaften 1977
- Charles Petzold, The Annotated Turing, John Wiley & Sons, Inc., ISBN 0-470-22905-5
Weblinks
 Commons: Turing Machine – Album mit Bildern und/oder Videos und Audiodateien
Commons: Turing Machine – Album mit Bildern und/oder Videos und Audiodateien- Eintrag, in: Stanford Encyclopedia of Philosophy (englisch, inklusive Literaturangaben)
- Die Turing-Maschine
- Varianten universeller Turingmaschinen
- A Turing Machine In Conway’s Game of Life
- Simulation einer Turingmaschine (Java-Applet)
- Webseite über eine physikalische Turing-Maschine inklusive Video – Gebaut von Mike Davey, funktioniert auch so wie Turing es definiert hat
Einzelnachweise
- ↑ auf englisch: oblivious, http://www.cs.princeton.edu/theory/complexity/, Abschnitt 2.3.4
- ↑ Karl Rüdiger Reischuk: Komplexitätstheorie. 2 Auflage. Band I: Grundlagen, Teubner, 1999, ISBN 978-3519122753. Seite 103
- ↑ http://www.cs.princeton.edu/theory/complexity/, Remark 1.10



Wikimedia Foundation.