- Elektromagnetische Induktion
-
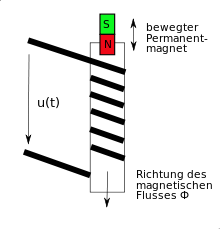 Ein bewegter Permanentmagnet erzeugt an den Klemmen einer Spule eine elektrische Spannung
Ein bewegter Permanentmagnet erzeugt an den Klemmen einer Spule eine elektrische Spannung
Unter elektromagnetischer Induktion (auch Faraday'sche Induktion, nach Michael Faraday, kurz: Induktion) versteht man das Entstehen einer elektrischen Spannung durch Änderung der magnetischen Flussdichte.
Ein typisches Beispiel für elektromagnetische Induktion zeigt das nebenstehende Bild: Durch Bewegung des Magneten wird eine elektrische Spannung erzeugt, die an den Klemmen der Spule messbar ist und für weitere Anwendungen bereitsteht.
Die elektromagnetische Induktion wurde 1831 von Michael Faraday bei dem Bemühen entdeckt, die Funktionsweise eines Elektromagneten („Strom erzeugt Magnetfeld“) umzukehren („Magnetfeld erzeugt Strom“). Der Zusammenhang ist eine der vier Maxwell'schen Gleichungen. Die Induktionswirkung wird technisch vor allem bei elektrischen Maschinen wie Generatoren, Elektromotoren und Transformatoren genutzt. Bei diesen Anwendungen treten stets Wechselspannungen auf. Abzugrenzen von der elektromagnetischen Induktion ist die sogenannte Unipolarinduktion, bei der direkt und ohne eine Gleichrichtung Gleichspannungen entstehen. Die Unipolarinduktion beruht jedoch nicht auf elektromagnetischer Induktion, sondern auf der Nutzung der Lorentzkraft.
Bei der durch Induktion entstehenden elektrischen Spannung handelt es sich um eine sogenannte Umlaufspannung oder Induktionsspannung. Diese ist dadurch gekennzeichnet, dass sie durch geschlossene elektrische Feldlinien dargestellt wird (Wirbelfeld). Hierdurch unterscheidet sich die Induktionsspannung von Spannungen, wie sie beispielsweise bei einer Batterie vorkommen (Potentialfeld). Die Feldlinien der sog. Urspannungsquellen EMK einer Batterie (siehe elektromotorische Kräfte[1]) verlaufen stets entgegen der Richtung des erzeugten elektrischen Feldes und sind nicht geschlossen.
In mathematischer Form lässt sich das Induktionsgesetz durch jede der folgenden drei gleichbedeutenden Gleichungen beschreiben:
Induktionsgesetz in SI-Einheiten differentielle Form Integralform I Integralform II 


In den Gleichungen bedeuten
 die elektrische Feldstärke und
die elektrische Feldstärke und  die magnetische Flussdichte. Die Größe
die magnetische Flussdichte. Die Größe  ist das gerichtete Flächenelement und
ist das gerichtete Flächenelement und  der Rand (Konturlinie) der betrachteten Integrationsfläche A;
der Rand (Konturlinie) der betrachteten Integrationsfläche A;  ist die lokale Geschwindigkeit der Konturlinie in Bezug auf das zugrundeliegende Bezugssystem. Das auftretende Linienintegral erfolgt entlang einer geschlossenen Linie und endet daher am Startpunkt. Zwischen zwei nebeneinanderstehenden Vektoren soll das Skalarprodukt genommen werden: d. h. alle drei kartesischen Vektorkomponenten werden miteinander multipliziert und die Ergebnisse addiert.
ist die lokale Geschwindigkeit der Konturlinie in Bezug auf das zugrundeliegende Bezugssystem. Das auftretende Linienintegral erfolgt entlang einer geschlossenen Linie und endet daher am Startpunkt. Zwischen zwei nebeneinanderstehenden Vektoren soll das Skalarprodukt genommen werden: d. h. alle drei kartesischen Vektorkomponenten werden miteinander multipliziert und die Ergebnisse addiert.Alle in den Gleichungen auftretenden Größen werden von einem beliebigen (aber für alle Größen gleichen) Bezugssystem (Inertialsystem) aus beschrieben. Wegen
 (Nichtexistenz von magnetischen Monopolen) sind alle drei Gleichungen miteinander mathematisch und physikalisch äquivalent. Insbesondere stehen sie mit der speziellen Relativitätstheorie in Übereinstimmung.
(Nichtexistenz von magnetischen Monopolen) sind alle drei Gleichungen miteinander mathematisch und physikalisch äquivalent. Insbesondere stehen sie mit der speziellen Relativitätstheorie in Übereinstimmung.Die Gleichungen eignen sich grundsätzlich für die Beschreibung ruhender und bewegter Körper. Zu beachten ist hierbei Folgendes:
- Die Konturlinie ist eine gedachte Linie. Da sie keine physikalische Entsprechung hat, hat eine eventuelle zeitliche Bewegung der Konturlinie grundsätzlich keinen Einfluss auf die stattfindenden physikalischen Prozesse. Insbesondere verändert eine Bewegung der Konturlinie nicht die Feldgrößen und . In der Integralform I wird die Bewegung der Konturlinie daher überhaupt nicht berücksichtigt. In der Integralform II beeinflusst die Bewegung der gedachten Konturlinie beide Seiten der Gleichung in gleichem Maße, so dass man bei der Berechnung beispielsweise einer elektrischen Spannung mit Integralform I zu dem gleichen Ergebnis kommt wie bei der Berechnung derselben Spannung mithilfe von Integralform II.
- Grundsätzlich darf die Geschwindigkeit der Konturlinie von der Geschwindigkeit der im Experiment verwendeten Körper (z. B. Leiterschleife, Magnete) abweichen. Die Geschwindigkeit der Konturlinie in Bezug auf den Beobachter wird im Rahmen des Artikels mit gekennzeichnet, während die Geschwindigkeit von Objekten mit dem Buchstaben
 beschrieben wird.
beschrieben wird. - Im Gegensatz zur Bewegung der Konturlinie hat die Geschwindigkeit der Körper im Allgemeinen einen Einfluss auf die stattfindenden physikalischen Vorgänge. Das gilt insbesondere für die Feldgrößen und , die der jeweilige Beobachter misst.
Geschichtliche Entwicklung und Zusammenhang
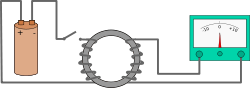 Zeichnung von Faradays historischem Experimentalaufbau: Eine Änderung des magnetischen Flusses in der linken Spule induziert einen Strom in der rechten Spule[2]
Zeichnung von Faradays historischem Experimentalaufbau: Eine Änderung des magnetischen Flusses in der linken Spule induziert einen Strom in der rechten Spule[2].
 Michael Faraday – Entdecker der Induktion
Michael Faraday – Entdecker der InduktionDie elektromagnetische Induktion als Teil der Maxwell'schen Gleichungen und der klassischen Elektrodynamik (KED) spiegelt den Kenntnisstand aus dem Ende des 19. Jahrhunderts wider. Es wurden damals teilweise andere Begriffe und Nomenklaturen als heute für die Darstellungen benutzt, die grundlegenden Vorstellungen über den Induktionsvorgang waren vorhanden.
Als Entdecker des Induktionsgesetzes gelten Michael Faraday und Joseph Henry, die das Induktionsgesetz im Jahr 1831 unabhängig voneinander entdeckt haben, wobei Faraday seine Ergebnisse als erster veröffentlicht hat[3][4].
In Faradays erstem Demonstrationsaufbau zur Induktion vom 29. August 1831[5] wickelte er zwei Leiterdrähte auf entgegengesetzte Seiten eines Eisenkerns; eine Anordnung, die modernen Ringkerntransformatoren ähnelt. Er erwartete aufgrund seiner Kenntnisse über Permanentmagnete, deren Eigenschaften zu dieser Zeit gerade erst untersucht worden waren, dass sich eine Art Welle entlang des Rings ausbreitet, sobald in einer der beiden Leitungen ein Strom zu fließen beginnt, und zu einem Stromfluß auf der anderen Seite des Rings führt. Im Experiment schloss er an einem der beiden Drähte ein Galvanometer an und betrachtete den Zeigerausschlag, während er den anderen Draht an eine Batterie anschloss. Tatsächlich beobachtete er jedes Mal einen transienten Stromfluss, wenn der Leiter mit der Batterie verbunden oder getrennt wurde[6]. Die Ursache dieser Induktionserscheinung war die Änderung des magnetischen Flusses in der von der Leiterschleife aufgespannten Fläche. In der folgenden Zeit identifizierte Faraday weitere Beispiele elektromagnetischer Induktion. So beobachtete er beispielsweise transiente Ströme in einer Spulenanordnung, wenn er einen Permanentmagneten rasch in die Spule hinein und wieder herausbewegte. Aus den historischen Untersuchungen ging auch die sogenannte Faradayscheibe, ein Gleichstromgenerator, hervor[7], die aus heutiger Sicht als sogenannte "Bewegungsinduktion" beschrieben wird und ihre Ursache in der Bewegung des Leiters im magnetischen Feld hat.
Anfang des 20. Jahrhunderts erfolgte die relativistische Eingliederung des Induktionsgesetzes im Rahmen der speziellen Relativitätstheorie. Dabei wurde einerseits auf die Verhältnisse bei Geschwindigkeiten nahe der Lichtgeschwindigkeit Rücksicht genommen. Andererseits konnte im Rahmen der Relativitätstheorie beschrieben werden, wie sich beispielsweise die Beträge der elektrischen und magnetischen Feldkomponenten in Abhängigkeit von der Bewegung zwischen einem Beobachter und einer beobachteten elektrischen Ladung verändern. Diese Abhängigkeiten in der relativen Bewegung zueinander zwischen verschiedenen Bezugssystemen werden durch die Lorentz-Transformation beschrieben. Dabei zeigt sich, dass das Induktionsgesetz (so wie die restlichen Maxwell'schen Gleichungen) „lorentzinvariant“ ist. Das heißt, die Struktur der Gleichungen wird durch die Lorentz-Transformation zwischen verschiedenen Bezugssystemen nicht verändert. Dabei wird auch besonders deutlich, dass die elektrischen und magnetischen Felder nur zwei Erscheinungsformen desselben Phänomens sind.
In der Mitte des 20. Jahrhunderts gelang im Rahmen der Elektrodynamik die Verbindung der Quantenmechanik mit der speziellen Relativitätstheorie, und es wurde auch das Induktionsgesetz im Rahmen einer Quantenfeldtheorie des Elektromagnetismus formuliert. Diese Quantenfeldtheorie wird als Quantenelektrodynamik (QED) bezeichnet. Sie stellt heute, auch aufgrund des großen technischen Anwendungsgebietes, eine der durch Experimente am genauesten überprüften Theorien der Physik dar.
Allgemeines
Das Gesetz der elektromagnetischen Induktion, kurz Induktionsgesetz, beschreibt den Zusammenhang zwischen elektrischen und magnetischen Feldern. Es besagt, dass bei einer Änderung des magnetischen Flusses durch eine Fläche am Rand dieser Fläche eine Ringspannung entsteht. In besonders häufig verwendeten Formulierungen wird das Induktionsgesetz beschrieben, indem die Randlinie der Fläche als unterbrochene Leiterschleife dargestellt wird, an deren offenen Enden die Spannung gemessen werden kann.
Die zum Verständnis sinnvolle Beschreibung gliedert sich in zwei mögliche Darstellungsformen:
- Die Integralform oder auch globale Form des Induktionsgesetzes: Dabei werden die globalen Eigenschaften eines räumlich ausgedehnten Feldgebietes (über den Integrationsweg) beschrieben.
- Die Differentialform oder auch lokale Form des Induktionsgesetzes: Dabei werden die Eigenschaften einzelner lokaler Feldpunkte in Form von Dichten beschrieben. Die Volumina der globalen Form streben gegen null, und die auftretenden Feldstärken werden differenziert.
Beide Darstellungsformen beschreiben denselben Sachverhalt. Je nach konkretem Anwendungsfall und Problemstellung kann es sinnvoll sein, die eine oder die andere Form zu benutzen. Im Folgenden sind beide Darstellungsformen beschrieben.
Induktionsgesetz in Differentialform
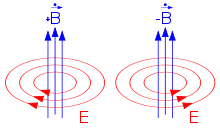 Grundvorstellung zur elektromagnetischen Induktion: Ändert sich die Flächendichte B des magnetischen Flusses durch ein Areal, wird es dadurch von einem elektrischen Wirbelfeld E umgeben, das (wenn möglich) einen der Flussänderung entgegenwirkenden Strom induziert. Die Zeichnungen zeigen einen möglichen Momentanwert der Feldgrößen. Dabei wird
Grundvorstellung zur elektromagnetischen Induktion: Ändert sich die Flächendichte B des magnetischen Flusses durch ein Areal, wird es dadurch von einem elektrischen Wirbelfeld E umgeben, das (wenn möglich) einen der Flussänderung entgegenwirkenden Strom induziert. Die Zeichnungen zeigen einen möglichen Momentanwert der Feldgrößen. Dabei wird angenommen.
angenommen.Das Induktionsgesetz in Differentialform lautet:
Das Vorhandensein von elektrischen Wirbeln bzw. einer zeitveränderlichen magnetischen Flussdichte ist das wesentliche Kennzeichen von Induktion. In elektrischen Feldern ohne Induktion (z. B. in dem Feld unbewegter Ladungen) existieren keine geschlossenen Feldlinien der elektrischen Feldstärke E, und das Umlaufintegral der elektrischen Feldstärke ergibt immer null.
Seine Hauptanwendung findet das Induktionsgesetz in Differentialform einerseits bei theoretischen Herleitungen und in der numerischen Feldberechnung, andererseits (jedoch seltener) in der analytischen Berechnung konkreter technischer Fragestellungen.
Wie in Einsteins erstem Werk über die spezielle Relativitätstheorie [8] gezeigt wurde, stehen die Maxwellgleichungen in Differentialform in Übereinstimmung mit der speziellen Relativitätstheorie. Eine an den heutigen Sprachgebrauch angepasste Herleitung hierzu findet sich in dem inzwischen vergriffenen Lehrbuch von Simonyi[9].
Übergang von der Differential- in die Integralform
Der Zusammenhang zwischen der Integralform und der Differentialform kann mithilfe des Satzes von Stokes mathematisch exakt beschrieben werden. Dabei werden die globalen Wirbel- und Quellenstärken in lokale, diskrete Wirbel- bzw. Quellendichten, welche einzelnen Raumpunkten (Punkten eines Vektorfeldes) zugeordnet sind, übergeführt.
Ausgangspunkt ist das Induktionsgesetz in Differentialform
Zur Überführung in die integrale Form wird der Satz von Stokes verwendet, der aus naheliegenden Gründen mit der Variablen
formuliert wird:Ersetzt man im rechten Term des Stokes'schen Gesetzes das Vektorfeld
entsprechend dem Induktionsgesetz in Differentialform durch den Term  , so ergibt sich
, so ergibt sichDieses ist eine mögliche allgemeine Form des Induktionsgesetzes in Integralform[10], die entgegen vieler anderslautender Behauptungen sowohl für ruhende als auch für bewegte Leiter gültig ist[11].
Um eine Formulierung zu erhalten, die den magnetischen Fluss
 enthält, addiert man auf beiden Seiten der Gleichung den Term
enthält, addiert man auf beiden Seiten der Gleichung den Term  . Dabei ergibt sich:
. Dabei ergibt sich:Der rechte Teil der Gleichung entspricht wegen
 der negativen zeitlichen Änderung des magnetischen Flusses[12][13], so dass das Induktionsgesetz in Integralform in voller Allgemeingültigkeit auch folgendermaßen notiert werden kann:
der negativen zeitlichen Änderung des magnetischen Flusses[12][13], so dass das Induktionsgesetz in Integralform in voller Allgemeingültigkeit auch folgendermaßen notiert werden kann:In den einführenden Lehrbüchern werden diese Zusammenhänge leider nicht immer richtig notiert, was daran erkennbar ist, dass der auf der linken Gleichungsseite notierte Term
 in vielen Darstellungen fehlt[14][15][16]. Der Irrtum besteht wahrscheinlich darin, dass der fehlende Term irrtümlich der elektrischen Feldstärke zugeschlagen wird. (Manche Autoren sprechen in diesem Zusammenhang auch von einer "effektiven" elektrischen Feldstärke.[17]) In seiner Konsequenz führt das Weglassen des Terms dazu, dass die Größe "E" inkonsistent verwendet wird und je nach dem Zusammenhang eine unterschiedliche Bedeutung hat[18]
in vielen Darstellungen fehlt[14][15][16]. Der Irrtum besteht wahrscheinlich darin, dass der fehlende Term irrtümlich der elektrischen Feldstärke zugeschlagen wird. (Manche Autoren sprechen in diesem Zusammenhang auch von einer "effektiven" elektrischen Feldstärke.[17]) In seiner Konsequenz führt das Weglassen des Terms dazu, dass die Größe "E" inkonsistent verwendet wird und je nach dem Zusammenhang eine unterschiedliche Bedeutung hat[18]Induktionsgesetz in Integralform
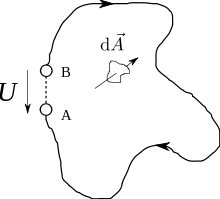
 Die Spannung zwischen den beiden Punkten A und B entlang des eingezeichneten Weges ist die Summe des Produktes
Die Spannung zwischen den beiden Punkten A und B entlang des eingezeichneten Weges ist die Summe des Produktes aus der elektrischen Feldstärke und dem Wegstückchen
aus der elektrischen Feldstärke und dem Wegstückchen 
.
Im folgenden Abschnitt wird die erste Integralform des Induktionsgesetzes betrachtet:
Entsprechend der mathematischen Formulierung des Integrals wird die Fläche A zu einem konstanten Zeitpunkt betrachtet und deren zeitliche Änderung nicht berücksichtigt.
Im Hinblick auf den Begriff der induzierten Spannung - das Integral über die elektrische Feldstärke - wird zunächst die im nebenstehenden Bild eingezeichnete Verbindungslinie zwischen den Punkten A und B in einem elektrischen Feld betrachtet.
Die Spannung zwischen den Punkten A und B („äußerer Pole“ einer „Steckdose“) kann man näherungsweise berechnen, indem man den Weg in viele kleine Wegelemente
unterteilt. Da man aufgrund der nur geringen Länge näherungsweise von einer konstanten elektrischen Feldstärke entlang des Wegstückes ausgehen kann, ergibt sich für die Teilspannung entlang eines Wegelementes im Innern der Wert .
.
Als Gesamtspannung zwischen beiden Punkten ergibt sich somit
 .
.
Die exakte Darstellung wird mithilfe eines Integrals definiert. Dieses kann man sich als Grenzwert für unendlich viele Wegstücke mit unendlich kleiner Länge
 vorstellen. Zur Berechnung definiert man i. A. eine von einem Parameter ξ abhängige Funktion
vorstellen. Zur Berechnung definiert man i. A. eine von einem Parameter ξ abhängige Funktion  , die im Bereich ξ = 0...1 die Punkte entlang der Wegstrecke beschreibt (im Innern also in Pfeilrichtung). Die Spannung zwischen beiden Punkten kann dann über ein Kurvenintegral formal erfasst werden:
, die im Bereich ξ = 0...1 die Punkte entlang der Wegstrecke beschreibt (im Innern also in Pfeilrichtung). Die Spannung zwischen beiden Punkten kann dann über ein Kurvenintegral formal erfasst werden: berechnet in Pfeilrichtung
berechnet in Pfeilrichtung
Lässt man nun den Punkt entlang der Kontur
 eines Gesamtumlaufes weiterwandern, bis er die eingeschlossene Fläche genau einmal umrundet hat und wieder mit Ausgangspunkt identisch wird (A=B), ergibt sich als Gesamtwert die in der geschlossenen Leiterschleife induzierte Umlaufspannung Uind:
eines Gesamtumlaufes weiterwandern, bis er die eingeschlossene Fläche genau einmal umrundet hat und wieder mit Ausgangspunkt identisch wird (A=B), ergibt sich als Gesamtwert die in der geschlossenen Leiterschleife induzierte Umlaufspannung Uind:Hinsichtlich des Vorzeichens ist zu berücksichtigen, dass die Kontur die Fläche dabei im Sinne der Rechte-Hand-Regel umrundet.
Der dritte Ausdruck obiger Gleichungen ist dabei die dem zweiten Ausdruck gleichwertige vektorielle Darstellung des tangentialen Feldstärkeanteils mithilfe des Skalarproduktes, und die beiden Integrale sind sogenannte Ringintegrale, die immer dann verwendet werden, wenn (wie hier) längs eines in sich geschlossenen Weges integriert wird, in diesem Fall entlang der Kontur der Leiterschleife C.
Die induzierte Spannung lässt sich bei einer nichtbewegten Leiterschleife näherungsweise als Spannungsabfall mit einem Spannungsmessgerät messen, wenn man entlang der geschlossenen Linie eine Leiterschleife anbringt und diese an einer Stelle auftrennt. Da über dem Leiterdraht nahezu keine elektrische Spannung abfällt, tritt die gesamte induzierte Spannung an den Klemmen in Erscheinung.
Darstellung mithilfe der elektromotorischen Kraft
 Die zeitliche Änderung des durch eine Leiterschleife eingeschlossenen magnetischen Flusses ist an den Enden der Leiterschleife als Spannung messbar.
Die zeitliche Änderung des durch eine Leiterschleife eingeschlossenen magnetischen Flusses ist an den Enden der Leiterschleife als Spannung messbar.In der englischsprachigen Literatur und teilweise auch in der deutschen Literatur wird anstelle des allgemeinen Induktionsgesetzes (Englisch: Maxwell-Faraday-Equation) häufig das sogenannte "Faradaysche Induktionsgesetz" (Englisch: Faraday's law of induction) gelehrt.
Hierbei handelt es sich um eine spezielle Formulierung des Induktionsgesetzes, die im Gegensatz zum allgemeinen Induktionsgesetz zwar einen etwas geringeren Anwendbarkeitsbereich umfasst, aber etwas einfacher anzuwenden ist. Im Unterschied zum allgemeinen Induktionsgesetz, das die Betrachtung einer beliebigen berandeten Fläche A zulässt, beschreibt das Faradaysche Induktionsgesetz die Verhältnisse bei einer im elektromagnetischen Feld ruhenden oder bewegten dünnen, gut leitfähigen Leiterschleife und setzt die an den Enden der Leiterschleife messbare Spannung in Verbindung mit der in der Fläche stattfindenden Flussänderung.
Trennt man die Leiterschleife an einer Stelle auf und misst die elektrische Spannung U zwischen den Enden der Klemmen mit einem Voltmeter, so erhält man bei vernachlässigbar kleiner (unbedrahteter) Öffnung der Leiterschleife, vernachlässigbar kleinem elektrischen Strom in der Leiterschleife, ruhendem Voltmeter in Bezug auf den Beobachter und nichtrelativistischen Geschwindigkeiten
 der Teilstücke der Schleife die Spannung
der Teilstücke der Schleife die Spannung .
.
Hinsichtlich der Vorzeichen wird wie üblich vorausgesetzt, dass die Flächennormale und die Umlaufrichtung der Flächenkontur rechtshändig zueinander verlaufen.
Häufige Formulierungen verwenden in diesem Zusammenhang den Begriff der elektromotorischen Kraft EMK (Englisch: electromotive force EMF), der über folgende Gleichung definiert ist:
Hierbei stellt man sich vor, dass die Leiterschleife entlang der Kontur
verläuft und dass Kontur und Leiterschleife zu jedem Zeitpunkt die gleiche Geschwindigkeit aufweisen ( ). Die Einheit der elektromotorischen Kraft lautet [EMK] = 1V, es handelt sich also bei der EMK nicht um eine Kraft im Sinne der Mechanik.
). Die Einheit der elektromotorischen Kraft lautet [EMK] = 1V, es handelt sich also bei der EMK nicht um eine Kraft im Sinne der Mechanik.Das Induktionsgesetz für die Leiterschleife kann mithilfe der elektromotorischen Kraft auch folgendermaßen geschrieben werden:
Der Zusammenhang soll im folgenden für nichtrelativistische Geschwindigkeiten
nachgewiesen werden. Da Leiterschleifen in der Praxis ausschließlich mit nichtrelativistischen Geschwindigkeiten bewegt werden, kann die Frage nach dem Grenzfall für  offengelassen werden:
offengelassen werden:Gesucht wird die Klemmenspannung U, die bei Beachtung der eingezeichneten Integrationsrichtung entlang der gestrichelten Linie ausgedrückt werden kann als
 .
.
Diese soll mithilfe des Faradayschen Induktionsgesetzes in Integralform entsprechend
berechnet werden.
Befindet sich die betrachtete Kontur
am gleichen Ort wie die Leiterschleife und bewegt sie sich mit der gleichen Geschwindigkeit wie diese, so gilt und man kann schreiben:Aufgrund der vorausgesetzten idealen Leitfähigkeit der Leiterschleife gilt für den Ort der Leiterschleife aus Sicht des mitbewegten Beobachters
 . Mithilfe der nichtrelativistisch genäherten Lorentztransformation für das elektrische Feld ergibt sich daraus für den Bereich der Leiterschleife
. Mithilfe der nichtrelativistisch genäherten Lorentztransformation für das elektrische Feld ergibt sich daraus für den Bereich der Leiterschleifeund somit
 .
.
Der im Integral
 enthaltene Ausdruck
enthaltene Ausdruck  hat also ausschließlich in dem gestrichelt gezeichneten Wegbereich zwischen den Klemmen einen von null verschiedenen Wert, so dass gilt:
hat also ausschließlich in dem gestrichelt gezeichneten Wegbereich zwischen den Klemmen einen von null verschiedenen Wert, so dass gilt:
Da das Voltmeter in Bezug auf den Beobachter ruht, kann diese Gleichung vereinfacht werden zu
 .
.Ersetzt man das erste Integral entsprechend der Definition der Klemmenspannung durch − U, multipliziert die Gleichungskette mit (-1) und lässt den mittleren Teil der Gleichungskette weg, so ergibt sich als Lösung
 ,
,
was zu zeigen war.
Da die Klemmenspannung entsprechend
zum Teil auf die Bewegung der Leiterschleife und zum Teil auf die Änderung der Flussdichte zurückgeführt werden kann, unterscheiden manche Autoren in diesem Zusammenhang zwischen der sogenannten "Ruheinduktion" und der "Bewegungsinduktion".
Da es in diesem Zusammenhang leicht zu Begriffsverwechslungen kommen kann, sei angemerkt:
- Bei Induktion im Sinne der 2. Maxwell'schen Gleichung handelt es sich ausschließlich um "Ruheinduktion".
- "Bewegungsinduktion" ist keine Induktion im Sinne der 2. Maxwell'schen Gleichung, sondern ein Ergebnis der Wirkung der Lorentzkraft auf die in der Leiterschleife vorhandenen Ladungen.
Induktionsgesetz in gemischter Darstellung (Flussregel)
In technischen Anwendungen werden die Körper meist mit nichtrelativistischen Geschwindigkeiten
bewegt. Bewegt man die Flächenkontur mit dem betrachteten Leiterelement in einem Stromkreis gleichförmig mit, so dass gilt und setzt man die für kleine Geschwindigkeiten genäherte Lorentztransformation  in die Integralform II des Induktionsgesetzes ein, so gelangt man zu der gemischten Darstellung des Induktionsgesetzes, die auch "Flussregel" genannt wird:
in die Integralform II des Induktionsgesetzes ein, so gelangt man zu der gemischten Darstellung des Induktionsgesetzes, die auch "Flussregel" genannt wird:
Hierbei ist die Größe
 die Feldstärke, die im Ruhesystem des mit der Geschwindigkeit bewegten Wegelementes
die Feldstärke, die im Ruhesystem des mit der Geschwindigkeit bewegten Wegelementes  herrscht (d. h. im mitbewegten System). Alle anderen Größen werden im Ruhesystem des Beobachters gemessen.
herrscht (d. h. im mitbewegten System). Alle anderen Größen werden im Ruhesystem des Beobachters gemessen.Ohmsches Gesetz für bewegte Leiter
Im Unterschied zu einem ruhenden Leiter, bei dem ausschließlich die Coloumbkraft stromtreibend wirkt, wirkt auf die Ladungen in einem bewegten Leiter die komplette Lorentzkraft
Für nichtrelativistische Geschwindigkeiten
ist die im ruhenden Bezugssystem gemessene Lorentzkraft gleich groß wie die Kraft, die die Ladung im mitbewegten System erfährt.Für bewegte Materialien, für die das Ohmsche Gesetz gilt, kann die spezifische Leitfähigkeit κ durch die Gleichung
mit der elektrischen Feldstärke
, der Geschwindigkeit des jeweiligen Leiterelements und der magnetischen Flussdichte definiert werden. Das Ohmsche Gesetz lautet dann wie im Falle unbewegter Materialien .
.
Anwendungen des Induktionsgesetzes
Bei Anwendungen des Induktionsgesetzes muss strikt darauf geachtet werden, in welchem Bezugssystem die zugehörigen Vorgänge beschrieben werden. Denn die elektromagnetischen Feldgrößen ändern sich bei einer Änderung des Bezugssystemes. Dies soll an einem Beispiel erläutert werden:
- Ein Beobachter betrachtet eine Ladung q, die sich relativ zu ihm nicht bewegt. Er stellt fest, dass ein elektrisches Feld existiert, die magnetische Flussdichte aber an allen Orten gleich null ist:

- Bewegt sich der Beobachter von der Ladung weg, so erkennt er in der relativ zu ihm bewegten Ladung einen elektrischen Strom, der ein magnetisches Feld mit sich führt. Er wird also ein elektrisches Feld und ein magnetisches Feld beobachten.
Die gegenseitige Umwandlung der Felder ineinander wird durch die sogenannte Lorentztransformation beschrieben, die aus der speziellen Relativitätstheorie hervorgeht.
Bewegen sich die Ladungen relativ zum Beobachter nur mit kleinen Geschwindigkeiten
, so wird der Beobachter in jedem solchen Bezugssystem die gleiche Größe der Lorentzkraftmessen. Das kann man so interpretieren, dass bei einer Änderung des Bezugssystems elektrische und magnetische Anteile der Kraft ineinander übergehen.
Bei relativistischen Geschwindigkeiten ist zu berücksichtigen, dass der Begriff der (dreikomponentigen) Kraft aus der klassischen (nichtrelativistischen) Mechanik stammt und zwei sehr schnell gegeneinander bewegte Beobachter bei dem gleichen physikalischen Vorgang stets unterschiedliche Kräfte beobachten. Zur korrekten Beschreibung relativistischer Kräfte eignen sich die sogenannten Viererkräfte, die Elemente eines Minkowski-Raumes sind.
Induktion in ruhenden Systemen
Bei der Beschreibung eines physikalischen Vorgangs ist es erforderlich, sich darüber klarzuwerden, in welchem Bezugssystem die Messungen durchgeführt werden. Ein System soll als "ruhend" aufgefasst werden, wenn aus Sicht des gewählten Beobachters alle beteiligten Komponenten des Messsystems ruhen. In diesem Fall ist die Beschreibung der Induktion am einfachsten, da keine Notwendigkeit besteht, relativistische Effekte zu berücksichtigen. Einleitend sollen daher zwei Beispiele mit unbewegten Komponenten betrachtet werden. Zweckmäßigerweise wird bei Anwendung des Induktionsgesetzes für eine ruhende Anordnung von einer ruhenden Integrationsfläche ausgegangen. Da sich bei einer ruhenden Anordnung die betrachtete Fläche mit der Zeit nicht ändert (
 ), kann das Flächenintegral über die zeitliche Ableitung der Flussdichte, das im allgemeinen Induktionsgesetz enthalten ist, durch die zeitliche Ableitung des magnetischen Flusses ersetzt werden:
), kann das Flächenintegral über die zeitliche Ableitung der Flussdichte, das im allgemeinen Induktionsgesetz enthalten ist, durch die zeitliche Ableitung des magnetischen Flusses ersetzt werden:Unterbrochene metallische Leiterschleife
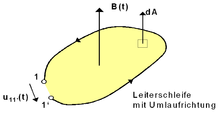
Im einfachsten Fall liegt eine metallische Leiterschleife mit Unterbrechung vor. Da das Innere eines Leiters stets feldfrei ist (
 d. h. auf die Ladungsträger werden keine Kräfte ausgeübt), tritt die gesamte Umlaufspannung an den Klemmen als Spannung
d. h. auf die Ladungsträger werden keine Kräfte ausgeübt), tritt die gesamte Umlaufspannung an den Klemmen als Spannungauf.
Bei Zunahme des B-Felds während des Zeitschrittes dt liegt eine Vergrößerung des magnetischen Flusses
vor, da das B-Feld und die Flächennormale von A in die gleiche Richtung zeigen. Dem Minuszeichen im Induktionsgesetz entsprechend ist die Spannung u11' negativ. Bei Abnahme des B-Felds während des Zeitschrittes dt liegt eine Verringerung des Flusses vor. Dem Minuszeichen im Induktionsgesetz entsprechend ist die Spannung u11' positiv.
Geschlossene ideal-leitende Leiterschleife
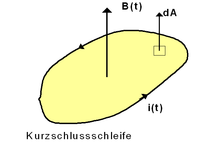 Kurzschlussschleife
KurzschlussschleifeEine geschlossene Leiterschleife mit idealer Leitfähigkeit verhindert, dass sich der magnetische Fluss durch die von der Leiterschleife aufgespannte Fläche ändert, denn wegen der idealen Leitfähigkeit des Metalls ist das Umlaufintegral des elektrischen Feldes gleich null und es gilt:
Das Entstehen der Flussänderung wird durch die in der Leiterschleife induzierten Ströme verhindert, was i. A. eine lokale Änderung der Flussdichte erzeugt, da das magnetische Feld der induzierten Ströme in Leiternähe am größten ist und somit in der Nähe der Leiter die größte Kompensationswirkung stattfindet. Der Gesamtfluss, das heißt die über die gesamte Schleifenfläche integrierte Flussdichte, ändert sich dabei jedoch nicht.
Leiterschleife mit endlichem Widerstand
In der Praxis ist der elektrische Widerstand einer Leiterschleife stets größer als null. Ist R der elektrische Widerstand des Leiters, so gilt
Wegen des Widerstands des elektrischen Leiters fließt ein elektrischer Strom, der dem magnetischen Feld die Momentanleistung
 entzieht und die Leiterschleife erwärmt. Nach diesem Prinzip arbeiten u. a. Induktionsbremsen und Induktionsherde. Bei Induktionsbremsen stammt die zur Aufrechterhaltung des B-Feldes nötige Energie aus der Bewegung des zugehörigen Fahrzeugs. Diese nimmt stetig ab, bis das Fahrzeug sich verlangsamt hat. Bei Induktionsherden stammt die Energie zur Aufrechterhaltung des Magnetfeldes aus dem Haushaltsnetz.
entzieht und die Leiterschleife erwärmt. Nach diesem Prinzip arbeiten u. a. Induktionsbremsen und Induktionsherde. Bei Induktionsbremsen stammt die zur Aufrechterhaltung des B-Feldes nötige Energie aus der Bewegung des zugehörigen Fahrzeugs. Diese nimmt stetig ab, bis das Fahrzeug sich verlangsamt hat. Bei Induktionsherden stammt die Energie zur Aufrechterhaltung des Magnetfeldes aus dem Haushaltsnetz.Die Aussage, dass der Strom i(t) seiner Ursache entgegenwirkt, ist im Sinne des gewählten Beschreibungsmodells problematisch. Tatsächlich fließt bei steigendem magnetischen Fluss wegen des Minuszeichens im Induktionsgesetz ein Strom entgegen der eingezeichneten positiven Stromrichtung. Dieser Strom erzeugt gemäß dem Durchflutungssatz eine magnetische Feldstärke H, die andersherum zeigt als das B-Feld. Es ist jedoch zu beachten, dass das Induktionsgesetz nicht zwischen Selbsterregung und Fremderregung unterscheidet. Insofern ist die Kompensationswirkung des induzierten Stromes schon im magnetischen Fluss Φ, der bei der Berechnung verwendet wird, enthalten.
Ist das B-Feld von außen aufgeprägt (sprich: lastunabhängig), so ändert sich der Fluss durch den entstehenden induzierten Strom nicht. Vielmehr kompensiert die Quelle, die das Magnetfeld erzeugt, die durch den induzierten Strom erzeugte Flussänderung, indem sie zusätzliche Energie zur Aufrechterhaltung des B-Feldes bereitstellt.
Diese Situation liegt in sehr guter Näherung beispielsweise an der Sekundärseite eines Transformators vor, wenn auf der Primärseite eine Primärspannung eingeprägt wird. Kurz nachdem im Sekundärkreis ein Strom zu fließen beginnt, erhöht sich in der primärseitigen Spannungsquelle der Quellenstrom, so dass der magnetische Fluss im gemeinsamen Kern vom Sekundärstrom letztlich kaum beeinflusst wird.
Induktion an einer elektrischer Spule
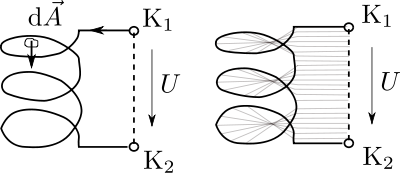 Induktion an einer elektrischen Spule
Induktion an einer elektrischen SpuleWie in den Vorlesungen von Haus[19] beschrieben wird, lässt sich der Integrationsweg für die elektrische Feldstärke auch bei einer mehrfach gewickelten Spule als Berandung einer einfachen Fläche angeben (vgl. nebenstehendes Bild). Das Induktionsgesetz in seiner allgemeinen Form erfordert daher keinen Faktor N für die Windungszahl der Spule, auch wenn der Spulendraht im konkreten Fall einen Zylinder mehrfach umläuft.
In den meisten Veröffentlichungen zur elektromagnetischen Induktion bei elektrischen Spule wird der Einfachheit halber der Faktor N für die Windungszahl eingeführt, und das Induktionsgesetz wird in der Form
angegeben. Hierbei bezeichnet Φw den von einer einzelnen Windung umschlossenen magnetischen Fluss, und Ui ist die induzierte Spannung
 für den Gesamtumlauf mit N Windungen durch den Wickeldraht, der durch ein kurzes Wegstück in der Luft zu einem Gesamtumlauf komplettiert wird. Gilt für die elektrische Feldstärke im Leiterdraht die Beziehung E = 0 (gute Leitfähigkeit, geringe Leiterströme), so ist die gesamte induzierte Spannung an den Klemmen messbar.
für den Gesamtumlauf mit N Windungen durch den Wickeldraht, der durch ein kurzes Wegstück in der Luft zu einem Gesamtumlauf komplettiert wird. Gilt für die elektrische Feldstärke im Leiterdraht die Beziehung E = 0 (gute Leitfähigkeit, geringe Leiterströme), so ist die gesamte induzierte Spannung an den Klemmen messbar.Zeitlich integrierte Form, Spannungszeitfläche
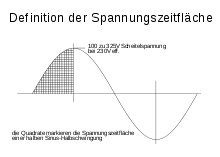 Die schraffierte Fläche stellt eine beispielhafte Spannungszeitfläche über die Dauer einer Viertelperiode der Sinusschwingung dar.
Die schraffierte Fläche stellt eine beispielhafte Spannungszeitfläche über die Dauer einer Viertelperiode der Sinusschwingung dar.Durch Integration über die Zeit lässt sich die angegebene Gleichung folgendermaßen umformen:
Diese Beziehung beschreibt den Flussverlauf als Integralfunktion des Spannungsverlaufs.
Betrachtet man den Vorgang in einem Zeitintervall von 0 bis T bei konstanter Fläche, durch die der magnetische Fluss tritt – das Zeitintervall kann sich beispielsweise über eine Halbperiode einer Wechselspannung erstrecken –, so folgt daraus für den sich dann ergebenden Fluss
Für den Fall Φw(0) = 0 bedeutet das, dass der magnetische Fluss durch eine Leiterschleife bzw. eine Flussänderung in dieser, wie sie sich durch Anlegen einer Spannung nach der gegebenen Zeit T dort einstellt, immer von dem Spannungszeitintegral in den angegebenen Grenzen 0 bis T verursacht sein und diesem auch entsprechen muss. Die dafür relevante Spannung ist jeweils die induzierte Spannung Ui. Diese entspricht der angelegten Spannung abzüglich Ohmscher Spannungsabfälle (I·R), soweit diese nicht zu vernachlässigen sind.
Zu veranschaulichen ist das Spannungszeitintegral auch als Fläche zwischen dem Spannungsgraphen und der Zeitachse über dem Intervall [0; T], weshalb man es bisweilen auch als Spannungszeitfläche bzw. Spannungszeitsumme[20] bezeichnet, in meist älterer Literatur in Anlehnung an den Begriff des Kraftstoßes auch als Spannungsstoß[21][22]. (Ursächlich hierfür ist der Umstand, dass messtechnisch früher die Integration von induzierten Spannungsimpulsen mittels ballistischer Galvanometer durchgeführt wurde. Vgl. auch Veranschaulichung des magnetischen Kraftflusses!)
Als weiteres Beispiel kann ein vielfach praktiziertes Messprinzip für den magnetischen Fluss dienen: Hier wird der zu messende Fluss von einer Messspule erfasst, und die Spannung an der Spule auf einen Integrator gegeben, der an seinem Ausgang als Ergebnis unmittelbar den Fluss anzeigt.
Induktion in bewegten Systemen
In Messsystemen mit bewegten Komponenten treten auch schon bei kleinen Geschwindigkeiten
relativistische Effekte auf. Diese grundsätzliche Tatsache wird durch ein einfaches Gedankenexperiment deutlich:- Ein Beobachter, der eine (relativ zu ihm nicht bewegte) Ladung beobachtet, wird ein elektrisches Feld messen, jedoch aufgrund des fehlenden Stromflusses kein magnetisches Feld.
- Bewegt sich der Beobachter hingegen auf die Ladung zu oder von ihr weg, so wird er einerseits bemerken, dass sich aufgrund der Bewegung das elektrische Feld verändert. Das bedeutet, dass der Beobachter bei gleicher Entfernung von der Ladung, aber anderer Relativgeschwindigkeit zur Ladung ein unterschiedliches E-Feld misst. Andererseits interpretiert der Beobachter die Ladung aber auch als einen Strom, der sich von ihm fort oder auf ihn zubewegt. Der Beobachter wird also zusätzlich zum elektrischen Feld ein magnetisches Feld erkennen.
Damit bei Messungen mit bewegten Komponenten keine Missverständnisse auftreten, ist die Angabe des Bezugssystemes, relativ zu dem die Beobachtungen beschrieben werden, unbedingt erforderlich.
Bewegter Leiterstab im Magnetfeld
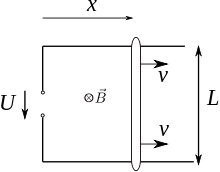 Aus Sicht des ruhenden Beobachters ist die elektrische Feldstärke im bewegten Leiterstab von null verschieden.
Aus Sicht des ruhenden Beobachters ist die elektrische Feldstärke im bewegten Leiterstab von null verschieden.Berechnung mithilfe des Induktionsgesetzes und des Ohmschen Gesetzes für bewegte Leiter
Betrachtet wird der nebenstehende Leiterstab im Magnetfeld. Da die Leiterschleife geöffnet ist, gilt I = 0 und daher:
In dem mit der Geschwindigkeit
bewegten Leiterstab ergibt sich somit aus Sicht eines Beobachters im Ruhesystem die Feldstärkewährend im Bereich des ruhenden Leiters mit
 eine Feldstärke von
eine Feldstärke vonherrscht.
Berechnet man das Ringintegral über die elektrische Feldstärke entlang des gesamten Stromkreises, so ergibt sich
Das Ringintegral lässt sich jedoch auch über das Induktionsgesetz in der Integralform I
formulieren, was sich wegen
 zu
zuvereinfacht.
Das Ergebnis für die an den Klemmen messbare Spannung lautet dementsprechend
Da das genannte Beispiel in vielen Darstellungen als ein Beispiel für elektromagnetische Induktion dargestellt wird, soll ausdrücklich bekräftigt werden:
- Die Klemmenspannung kann aus dem Ruhesystem heraus betrachtet nicht auf elektromagnetische Induktion zurückgeführt werden, da wegen
 keine Wirbel des elektrischen Feldes vorliegen und somit keine Induktion stattfindet.
keine Wirbel des elektrischen Feldes vorliegen und somit keine Induktion stattfindet. - Vom Ruhesystem aus betrachtet liegt also ein elektrisches Potentialfeld vor. Die stromtreibende Kraft wird durch den magnetischen Teil der Lorentzkraft verursacht.
Berechnung mithilfe der Flussänderung (EMK)
Mithilfe des Begriffes der elektromotorischen Kraft lässt sich das Ergebnis folgendermaßen darstellen: Im Zeitintervall dt bewegt sich der Leiterstab um das Wegstück vdt nach rechts. Der Stromkreis umschließt damit einen zusätzlichen magnetischen Fluss von dΦ = vdtLB, so dass gilt:
Hering'sches Paradoxon
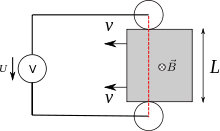 Ein Permanentmagnet wird in die Leiterschleife hineinbewegt. Obwohl in der betrachteten Fläche eine Flussänderung auftritt, schlägt das Voltmeter nicht aus!
Ein Permanentmagnet wird in die Leiterschleife hineinbewegt. Obwohl in der betrachteten Fläche eine Flussänderung auftritt, schlägt das Voltmeter nicht aus!Das nebenstehend dargestellte Experiment zum Hering'schen Paradoxon zeigt, dass bei Induktion nicht immer ein Ausschlag am Spannungsmessgerät vorliegen muss.
Anordnung:
- Ein elektrisch ideal leitfähiger Permanentmagnet wird mit der Geschwindigkeit v in eine Leiterschleife hineinbewegt. Der Permanentmagnet ist über Rollen elektrisch leitend mit der Leiterschleife verbunden.
Problem:
- Der geschlossene Umlaufweg soll entlang der Leiterschleife verlaufen und durch die eingezeichnete rote Linie komplettiert werden. Diese verläuft durch den Magneten, bewegt sich aber nicht mit ihm. Offenbar führt die Bewegung des Permanentmagneten zu einer Flussänderung in der aufgespannten Fläche, denn vor dem Einbringen des Magneten durchdringt keine Flusslinie die Fläche, danach aber schon. Trotzdem zeigt das Voltmeter zu keiner Zeit eine Spannung an. Dieser scheinbare Widerspruch beschreibt das Hering'sche Paradoxon.
Lösung:
- Wir beobachten die Vorgänge aus Sicht eines Beobachters beim Voltmeter. Das Wegintegral führt entlang der Leiterschleife und wird durch die rote Linie komplettiert. Für die elektrische Feldstärke gilt folgendes:
-
- In der unbewegten Drahtschleife wirkt aufgrund der hohen Leitfähigkeit eine Feldstärke von E = 0.
- Im Bereich der sich bewegenden Rollen gilt aus Sicht eines mit den Rollen mitbewegten Beobachters
 . Da die magnetische Flussdichte in den Rollen vereinbarungsgemäß vernachlässigt werden soll (B = 0), beobachtet der ruhende Beobachter für den Bereich der Rollen gemäß der Lorentztransformation ebenfalls
. Da die magnetische Flussdichte in den Rollen vereinbarungsgemäß vernachlässigt werden soll (B = 0), beobachtet der ruhende Beobachter für den Bereich der Rollen gemäß der Lorentztransformation ebenfalls  .
. - Ein mit dem Magneten mitbewegter Beobachter misst für die Feldstärke im Magneten . Entsprechend der Lorentztransformation für die elektrische Feldstärke ergibt sich daraus im Ruhesystem des Beobachters in nichtrelativistischer Näherung eine Feldstärke von
 .
.
Wir setzen das Induktionsgesetz in der zweiten Integralform an:
Da sich der Integrationsweg zeitlich nicht ändert (
), kann es auch alsgeschrieben werden.
Die induzierte Spannung
 setzt sich aus der Klemmenspannung am Voltmeter und der über die Länge L im Magneten integrierten elektrischen Feldstärke zusammen. Entsprechen der Gleichung
setzt sich aus der Klemmenspannung am Voltmeter und der über die Länge L im Magneten integrierten elektrischen Feldstärke zusammen. Entsprechen der Gleichung  für die Lorentztransformation zeigt die elektrische Feldstärke im Magneten "nach oben". Wird das Ringintegral über die elektrische Feldstärke wie üblich rechtshändig zur Flächennormalen durchgeführt (d. h. hier: im Uhrzeigersinn), so ergibt sich
für die Lorentztransformation zeigt die elektrische Feldstärke im Magneten "nach oben". Wird das Ringintegral über die elektrische Feldstärke wie üblich rechtshändig zur Flächennormalen durchgeführt (d. h. hier: im Uhrzeigersinn), so ergibt sichIn der Zeit dt vergrößert sich die vom Integrationsweg eingeschlossene Fläche des Magneten um dAΦ = Lvdt und der magnetische Fluss somit um dΦ = LvBdt. Der rechte Teil der Gleichung ergibt somit
Setzt man diese Größen in das Induktionsgesetz ein, so ergibt sich − U − LvB = − LvB, d. h.
Die induzierte Spannung tritt in diesem Beispiel nicht an den Klemmen der Anordnung, sondern im Permanentmagneten in Erscheinung. Das bereitet vielen Lernenden Verständnisprobleme, da sie implizit davon ausgehen, dass die zeitliche Änderung des magnetischen Flusses immer an den Klemmen abgreifbar ist (vgl. "Faraday's Law of Induction").
Die wesentliche Ursache, die zu den Verständnisproblemen führt, ist die Tatsache, dass sich im vorliegenden Fall die Geschwindigkeit
der Konturlinie und die Geschwindigkeit des Leiters (hier: des Magneten) voneinander unterscheiden. Definiert man die Konturlinie so, dass sie sich mit dem Magneten mitbewegt, so ergibt sich eine Flussänderung von null, und man erhält das Ergebnis U = 0 unmittelbar.Hinweis: Da in der Literatur viele unzutreffende Aussagen zum Hering'schen Paradoxon zu finden sind, soll an dieser Stelle ausdrücklich bekräftigt werden:
- Das Hering'sche Paradoxon zeigt keine Ausnahme vom Induktionsgesetz, sondern es ist - wie gezeigt - problemlos mit dem Induktionsgesetz vereinbar.
- Die Tatsache, dass das im englischsprachigen Raum verbreitete "Faraday's Law of Induction" nicht auf das Hering'sche Problem anwendbar ist, beruht darauf, dass die Geschwindigkeit der Konturlinie und die Geschwindigkeit des Leiters sich voneinander unterscheiden.
- Die Tatsache, dass "Faraday's Law of Induction" nicht unmittelbar auf das Problem anwendbar ist, bedeutet nicht, dass ein Widerspruch vorliegt, sondern nur, dass die Gleichung für das gegebene Problem nicht anwendbar ist. Faraday's Law of Induction deckt somit - anders als
 - nicht alle Fälle elektromagnetischer Induktion ab.
- nicht alle Fälle elektromagnetischer Induktion ab.
Hufeisenparadoxon
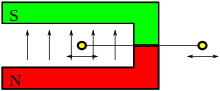 Bei der Bewegung der Leiterschleife tritt eine Flussänderung auf.
Bei der Bewegung der Leiterschleife tritt eine Flussänderung auf.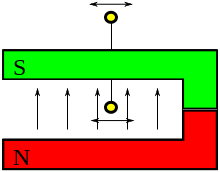 Bei der Bewegung der Leiterschleife tritt ebenfalls eine Flussänderung auf, die aber oft nicht erkannt wird.
Bei der Bewegung der Leiterschleife tritt ebenfalls eine Flussänderung auf, die aber oft nicht erkannt wird.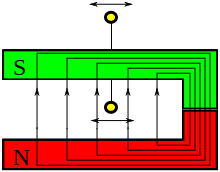 Die magnetische Flussdichte in den Schenkeln des Hufeisenmagneten ist nicht konstant.
Die magnetische Flussdichte in den Schenkeln des Hufeisenmagneten ist nicht konstant.Wenn an den Klemmen einer starren Leiterschleife eine Spannung abgreifbar ist, so kann diese dem Faradayschen Induktionsgesetz (Faraday's Law of Induction) entsprechend immer auf eine Flussänderung in der Leiterschleife zurückgeführt werden.
Hübel[23] weist darauf hin, dass diese Flussänderung in manchen Fällen dem ungeübten Auge jedoch verborgen bleibt und diskutiert die Probleme anhand verschiedener Anordnungen mit Hufeisenmagneten, wie sie typischerweise im Schulunterricht verwendet werden (vgl. nebenstehende Bilder). Während die Flussänderung in der Leiterschleife in der ersten Anordnung für Anfänger normalerweise leicht erkennbar ist, misslingt dies vielen Lernenden bei dem zweiten Bild. Die Lernenden konzentrieren sich auf den mit Luft erfüllten Bereich der Anordnung und berücksichtigen nicht, dass die Flussdichte im Pol des Permanentmagneten zum Außenbereich hin kontinuierlich abnimmt (siehe drittes Bild).
Die Antwort auf die Frage, ob bei der genannten Anordnung Induktion vorliegt oder nicht, hängt interessanterweise von der Wahl des Bezugssystems ab, in dem sich der Beobachter befindet:
- Ein Beobachter, für den der Hufeisenmagnet ruht ("Beobachter sitzt auf dem Magneten"), sieht bei vernachlässigbarem Strom in der Leiterschleife ein zeitlich konstantes Feld der magnetischen Flussdichte (
 ) und folgert daraus, dass keine Induktion vorliegt. Aus der Sicht dieses Beobachters liegt also ein elektrisches Potentialfeld vor, und die an den Klemmen der Leiterschleife messbare Spannung wird er folgerichtig auf die Wirkung der Lorentzkraft zurückführen.
) und folgert daraus, dass keine Induktion vorliegt. Aus der Sicht dieses Beobachters liegt also ein elektrisches Potentialfeld vor, und die an den Klemmen der Leiterschleife messbare Spannung wird er folgerichtig auf die Wirkung der Lorentzkraft zurückführen. - Ein Beobachter, für den die Leiterschleife ruht ("Beobachter sitzt auf der Leiterschleife"), sieht hingegen, dass sich die magnetische Flussdichte in der Leiterschleife ändert, denn aus seiner Sicht bewegt sich der Hufeisenmagnet in die Leiterschleife hinein bzw. heraus. Dieser Beobachter erklärt sich die an den Klemmen abgreifbare Spannung somit über die Induktion. Da die Leiterschleife aus seiner Sicht ihre Position nicht ändert (v = 0), kann er schließlich keine Lorentzkraft erkennen.
Das Beispiel zeigt, dass das Phänomen der Induktion nicht auf die Lorentzkraft zurückgeführt werden kann. Hierzu wäre es nämlich erforderlich, dass beide Phänomene im gleichen Bezugssystem stattfinden. Allerdings zeigt das Beispiel, dass nach dem Wechsel eines Bezugssystems eine elektrische Kraft (durch E-Feld verursachte Coloumbkraft) in eine magnetische Kraft (durch B-Feld verursachter magnetischer Teil der Lorentzkraft) übergeht.
In dem genannten Beispiel ist zu beachten, dass man bei der Berechnung der Klemmenspannung in den verschiedenen Bezugssystemen zu unterschiedlichen Zahlenwerten gelangt. Der Grund ist die Feldtransformation mittels der Lorentztransformation.
Technische Anwendungen
 Historischer Induktionsapparat aus dem Physikunterricht
Historischer Induktionsapparat aus dem Physikunterricht- Induktionsschleife für Kfz zur Steuerung von Verkehrsampelanlagen und Schranken
- dynamisches Mikrofon
- dynamisches (Magnet-) Tonabnehmersystem für Plattenspieler
- Tonabnehmer für elektrische Saiteninstrumente (z. B. E-Gitarre und E-Bass)
- Tonkopf zur Abtastung von Magnetbändern
- Generator = Dynamo = Lichtmaschine
- RFID-Tag (beispielsweise Ski-Pass)
- Transkranielle Magnetstimulation
- Induktionsgeber (auch induktiver Impulsgeber) als Drehzahlsensor (z. B. im Kfz–Bereich)
- Induktionshärten
- Induktionslampe
- Induktionssender
- Transformator
- Ringschleifenanlage für die Übertragung von Audiosignalen in Hörgeräte
- Aufwärtswandler
Eine elektromagnetische Kraft (EMK), d. h. eine an den Klemmen messbare Spannung, ist immer dann vorhanden, wenn sich der magnetische Fluss durch die Spule ändert: Da der Fluss das Produkt aus Flussdichte und Fläche ist, kann sich dazu entweder die Flussdichte B oder die Fläche A ändern; oder beides geschieht. Eine Änderung der Fläche wird erreicht, indem man z. B. die Spule in einem konstanten Magnetfeld oder einen Magneten in einer Spule dreht. Die vom Magnetfeld durchsetzte Fläche ist null, wenn die Spule quer zum Magnetfeld steht, sie ist maximal, wenn das Feld die Spule axial durchsetzt. Nach diesem Prinzip wird in einem Generator (Dynamomaschine) Strom erzeugt, der z. B. an nicht mitrotierenden Kontaktschleifen abgegriffen werden kann.
Eine Änderung der Flussdichte erreicht man u. a. durch ein veränderliches Magnetfeld. Nach diesem Prinzip wird in der Sekundärwicklung eines Transformators bei Speisung der Primärwicklung mit einer Wechselspannung eine Wechselspannung induziert, deren Höhe proportional zum Verhältnis der Windungszahlen ist.
Hierunter fallen auch alle Arten der induktiven Erwärmung durch Wirbelstrom: der Induktionsofen, Induktionshärten, das Induktionsfeld, usw.
Induktive Erwärmung von Werkstoffen: Induktionsöfen werden vorwiegend in der Industrie zum Härten, Löten, Schmelzen usw. eingesetzt. Diese Technik kommt aber zunehmend auch in der privaten Anwendung vor, beispielsweise in der Küche als Induktionskochfeld.
Induzierte Spannung und Klemmenspannung
In der Literatur wird der Begriff der induzierten Spannung von verschiedenen Autoren unterschiedlich aufgefasst. Ursache ist vermutlich die von Kröger und Unbehauen[24] kritisierte Inkonsistenz bei der Verwendung des Begriffes "elektrische Feldstärke".
Im vorliegenden Artikel wurden Begriffe und Gleichungen so gewählt, dass sich insgesamt ein zu den Maxwellgleichungen und zur speziellen Relativitätstheorie konsistentes Gesamtbild ergibt.
Unter "induzierter" Spannung wird im Rahmen des vorliegenden Artikels das Ringintegral
entlang der Konturlinie einer berandeten Fläche verstanden. Dabei wird vorausgesetzt, dass der Beobachter sich in einem (beliebigen) Inertialsystem befindet und alle Größen aus diesem Inertialsystem heraus beschreibt.
Wie die unter dem Lemma Unipolarinduktion aufgeführten Beispiele (bewegter Leiterstab im Magnetfeld, Faradayscheibe) zeigen, stimmt die induzierte Spannung nicht notwendigerweise mit der an den Klemmen eines Stromkreises abgreifbaren Klemmenspannung überein. Genau in diesem Sinne verwenden ihn manche Autoren aber auch, was beim Vergleich verschiedener Lehrbücher zu Verständnisproblemen führen kann.
Soll die Wirkung des magnetischen Feldes und der eventuellen Bewegung einer Leiterschleife im Feld auf die Klemmenspannung angeben werden, so wird im vorliegenden Artikel der Begriff "Klemmenspannung" oder der inzwischen nicht mehr überall gelehrte Begriff der elektromagnetischen Kraft
verwendet. Die elektromotorische Kraft entspricht in nichtrelativistischer Näherung der an den Klemmen einer Leiterschleife abgreifbaren Klemmmenspannung.
Den Begriff der "induzierten Gegenspannung", wie er gelegentlich zur Erklärung der Induktion an der elektrischen Spule verwendet wird, wird im vorliegenden Artikel nicht benutzt.
Selbstinduktion
Literatur
- Karl Küpfmüller, Gerhard Kohn: Theoretische Elektrotechnik und Elektronik. 14 Auflage. Springer, 1993, ISBN 3-540-56500-0.
- Adolf J. Schwab: Begriffswelt der Feldtheorie, Elektromagnetische Felder, Maxwell'sche Gleichungen. 6 Auflage. Springer, 2002, ISBN 3-540-42018-5.
Einzelnachweise und Fußnoten
- ↑ Zum Thema Batterie siehe auch W. Döring, Einführung in die Theoretische Physik, Bd. 2, Berlin (1965)
- ↑ Douglas C. Giancoli: Physics: Principles with Applications, Fifth edition, S. 623–624 1998
- ↑ Fawwaz Ulaby: Fundamentals of applied electromagnetics, 5th, Pearson:Prentice Hall 2007, ISBN 0-13-241326-4
- ↑ Joseph Henry. Distinguished Members Gallery, National Academy of Sciences. Abgerufen am 30. November 2006.
- ↑ The philosopher's tree: a selection of Michael Faraday's writings. CRC Press 1. Februar 1999, ISBN 9780750305709 (Zugriff am 28 August 2011)
- ↑ Michael Faraday, by L. Pearce Williams, p. 182-3
- ↑ Michael Faraday, by L. Pearce Williams, p. 191-5
- ↑ Albert Einstein, Zur Elektrodynamik bewegter Körper, Annalen der Physik und Chemie 17, 30. Juni 1905, Seiten 891-921
- ↑ K. Simonyi: Theoretische Elektrotechnik, 9. Auflage, VEB Deutscher Verlag der Wissenschaften, Berlin, 1989, Kap. 5.2.2
- ↑ Klaus W. Kark: Antennen und Strahlungsfelder -- Elektromagnetische Wellen auf Leitungen im Freiraum und ihre Abstrahlung, 3. Auflage, Vieweg+Teubner, Wiesbaden, 2010, Kap. 3.8.3, S. 47
- ↑ R. Kröger, R. Unbehauen: Zur Theorie der Bewegungsinduktion. Mitteilung des Lehrstuhls für Allgemeine und Theoretische Elektrotechnik, Universität Erlangen-Nürnberg, AEÜ, Band 36, Heft 9, 1982. Die Autoren erklären: Umgekehrt gelten insbesondere die Gl. (17a, b) (das sind das Induktionsgesetz in Differentialform und das vorgenannte Induktionsgesetz in Integralform, Anm.) entgegen allen anders lautenden Behauptungen auch für bewegte Leiter (allgemein für bewegte Medien).
- ↑ K. Simonyi: Theoretische Elektrotechnik, 9. Auflage, VEB Deutscher Verlag der Wissenschaften, Berlin, 1989, Kap. 1.5.3 -- bewegte Medien
- ↑ Panofsky and Philips: Classical Electricity and Magnetism , Second Edition, 1962, Addison Wesley. Die Autoren schreiben in Gl. (9-12):
 . Wegen
. Wegen  (Nichtexistenz von magnetischen Monopolen) ist der letzte Term im Zusammenhang mit B-Feldern gleich null und kann damit entfallen.
(Nichtexistenz von magnetischen Monopolen) ist der letzte Term im Zusammenhang mit B-Feldern gleich null und kann damit entfallen. - ↑ Albrecht Lindner: Grundkurs theoretische Physik 2. erw. Auflage, ISBN 3-519-13095-5 (Auszug in der Google Buchsuche)
- ↑ E. Hering, K.-H. Modler: Grundwissen des Ingenieurs 14. Auflage, ISBN 978-3-446-22814-6 (Auszug in der Google Buchsuche)
- ↑ W. Nerreter: Grundlagen der Elektrotechnik Hanser-Verlag, ISBN 3-446-40414-7 (Auszug in der Google Buchsuche)
- ↑ Hier ist auch die in diesem Artikel bereits genannte Analogie mit einer Batterie nützlich: im Zusammenhang mit Batterien spricht man statt von elektrischen Feldern von sog. elektromotorischen Kräften, und es tritt auch hier das bereits angesprochene Vorzeichenproblem auf (der elektrische Strom ist parallel, nicht antiparallel zu diesen Kräften).
- ↑ R. Kröger, R. Unbehauen: Zur Theorie der Bewegungsinduktion. Mitteilung des Lehrstuhls für Allgemeine und Theoretische Elektrotechnik, Universität Erlangen-Nürnberg, AEÜ, Band 36, Heft 9, 1982. Die Autoren kritisieren, dass die Bedeutung des Buchstaben für die elektrische Feldstärke dadurch inkonsistent verwendet wird und bekräftigen, dass die im Ruhesystem beobachtete magnetische Kraft nicht auf eine elektrische Feldstärke (gemessen im Ruhesystem) zurückgeführt werden kann. Wörtlich heißt es: Die Größe
 ist also im Laborsystem keine legitime elektrische Feldstärke. Sie hätte als solche in der Situation von Bild 1 auch eine seltsame stets übersehene Eigenschaft, nämlich Quellen bei negativen und Senken bei positiven Ladungen! Man kann eben nicht alles, was die Dimension der elektrischen Feldstärke hat, als solche bezeichnen. Es sei denn, man verzichtet darauf, überall in der Elektrodynamik unter "E" das gleiche zu verstehen.
ist also im Laborsystem keine legitime elektrische Feldstärke. Sie hätte als solche in der Situation von Bild 1 auch eine seltsame stets übersehene Eigenschaft, nämlich Quellen bei negativen und Senken bei positiven Ladungen! Man kann eben nicht alles, was die Dimension der elektrischen Feldstärke hat, als solche bezeichnen. Es sei denn, man verzichtet darauf, überall in der Elektrodynamik unter "E" das gleiche zu verstehen. - ↑ Herman A. Haus: Electromagnetic fields and Energy, Kap. 8.4 Internetlink
- ↑ Grimsehl: Lehrbuch der Physik, Bd. II; Leipzig 1954, S. 321-323
- ↑ Christian Gerthsen: Physik. 4. Auflage, Springer, Berlin 1956, S. 258
- ↑ Adalbert Prechtl: Vorlesungen über die Grundlagen der Elektrotechnik, Band 2; Springer-Verlag 2007, S. 121
- ↑ Horst Hübel: Was ist elektromagnetische Induktion? - Eine physikalisch-didaktische Analyse, Seite 6-7, Link zum Lehrtext Link zur Internetseite
- ↑ R. Kröger, R. Unbehauen: Zur Theorie der Bewegungsinduktion. Mitteilung des Lehrstuhls für Allgemeine und Theoretische Elektrotechnik, Universität Erlangen-Nürnberg, AEÜ, Band 36, Heft 9, 1982.
Weblinks
- Induktion bei LeiFi-Physik
- Erklärung der Induktion für Kinder
- Die Konturlinie























































Wikimedia Foundation.