- Funkfernsteuerung
-
 Sender einer programmierbaren Funkfernsteuerung
Sender einer programmierbaren Funkfernsteuerung
Die Funkfernsteuerung (engl. radio control oder RC) beruht auf dem Einsatz von Funksignalen zur Steuerung einer technischen Vorrichtung aus der Ferne. Der Begriff wird meist verwendet, um die Steuerung von Modellautos, -booten, -flugzeugen oder -hubschraubern mit einem vom Piloten betätigten Steuergerät zu bezeichnen. Für die Öffentlichkeit sind nur bestimmte Frequenzbänder (ohne Lizenz) freigegeben. Um mehrere Modelle bei einem Wettkampf betreiben zu können, sind freigegebene Frequenzbänder (27 MHz, 35 MHz, 40 MHz, 433 MHz, 2,4 GHz) durch ein Kanalraster unterteilt. Sende- wie Empfangskanal werden von einem Quarzoszillator vorgegeben. Moderne Sende- und Empfangsquarze (Quarzpaar) eines jeden Kanals besitzen eine Frequenzdifferenz in Höhe der Zwischenfrequenz des Empfängers. Neueste mikroprozessor-betriebene Empfänger kommen durch die Nutzung einer PLL ohne Kanalquarze aus.
Inhaltsverzeichnis
Geschichte
Mit der Erfindung der Funktechnik wurden die Grundlagen für eine drahtlose Übermittlung von Steuersignalen vorbereitet: Nikola Tesla führte bereits 1898 in New York ein funkferngesteuertes Schiffsmodell vor und ließ sich diesen Entwurf einer Funkfernsteuerung patentieren. Professionell wurden die ersten Funkfernsteuerungen in den 1920er-Jahren zur Steuerung von Zielschiffen für Schießübungen bei der Marine eingesetzt. In der zweiten Hälfte der 1930er-Jahren wurden die ersten erfolgreichen Versuche der Fernsteuerung von Flugmodellen besonders in England und Deutschland (unter anderem beim Rhönwettbewerb 1938) durchgeführt. Bereits 1936 wurde auf der Wasserkuppe mit dem Segel-Flugmodell BF 52 die erste von Ernst Namokel mit erbaute Funkfernsteuerung erfolgreich erprobt. Ein Nachbau des K-Röhrenempfängers mit einer Anodenspannung von 12 Volt und einer Heizspannung der Röhren von 3 Volt wurde von dem über 80-jährigen Ernst Namokel für die Ausstellung im Deutschen Segelflugmuseum mit Modellflug auf der Wasserkuppe zur Verfügung gestellt. Dieser Flug kann als ein weiterer Meilenstein in der Geschichte des Modellfluges gesehen werden. Der Nachbau des Modells BF 52 befindet sich ebenfalls in der Ausstellung.
Funkfernsteuerung im Zweiten Weltkrieg
Während des Zweiten Weltkrieges wurden Funkfernsteuerungen für eine Reihe von Flugobjekten verwendet. Das Ziel war insbesondere die Entwicklung funkgesteuerter Seezielflugkörper für den Einsatz gegen Schiffsverbände, die ansonsten nur schwierig und unter sehr hoher Eigengefährdung anzugreifen waren. Gegen Ende des Krieges hatte die Luftwaffe ähnliche Fragestellungen beim Angriff auf Bomberverbände, und es wurden zahlreiche ferngesteuerte Flugkörper entwickelt (elektropneumatische Systeme), die aber nicht mehr zum Einsatz kamen.
Nur für die ballistische V2-Rakete wurden bei 20 Flügen experimentell erstmals Fernsteuerungen mit Hilfe von Radarfrequenzen erprobt. Aber auch hier war es nur möglich, 1 Bit (1 Kanal An/Aus) zu übertragen, eine erwünschte Proportionalsteuerung blieb späteren Entwicklungsstadien vorbehalten.
Auch in Großbritannien und in den USA wurden Funksteuersysteme entwickelt, um die Gefährdung der Besatzungen beim Einsatz gegen stark verteidigte Ziele zu verringern. Jedoch erwies sich keines dieser Systeme als in der Praxis verwendbar. Ein Gerät, Projekt Aphrodite, erwies sich als gefährlicher für seine Benutzer als für das Ziel.[1]
Funksteuersysteme dieser Ära waren im Allgemeinen elektromechanischer Natur. So wurde ein Radiogerät in einen Flugkörper eingebaut, das vom Steuerpult übertragene Signal wurde demoduliert und einem kleinen Lautsprecher zugeführt. Vor dem Lautsprecher waren einige kleine Metallzungen mit unterschiedlichen Resonanzfrequenzen angebracht, die aber enorme Anforderungen an die Frequenzstabilität der senderseitigen Tongeneratoren stellten. Durch deren Schwingungen wurden schließlich die Steuerimpulse für die Ruder ausgelöst.
Die Idee der Tonmodulation und der Zungenrelais-Schaltstufen wurde in der frühen Nachkriegsära bei den A2-Modellfernsteuerungen erneut aufgegriffen – erst die Erfindung des Transistors und der hochempfindlichen Resonanz-Tonkreis-Schaltstufe mit Rückkopplung brachte jedoch den erhofften Durchbruch bei der Betriebssicherheit.
Erste Modellfunkfernsteuerungen
Der Physiker Nikola Tesla stellte bereits 1898 auf der Weltausstellung in New York ein von ihm entwickeltes funkferngesteuertes elektrisches Modellboot vor. Die ersten Modellfunkfernsteuerungen gab es in der zweiten Hälfte der 1930er-Jahre, damals noch in der Regel in Eigenbau mit Röhrensender und -Empfänger hergestellt. Ab Anfang der 1950er-Jahre waren in Deutschland die ersten serienmäßig hergestellten Röhrenfernsteuerungen erhältlich – technisch sehr einfache Geräte mit Trägertastung; die Hochfrequenz des Funksenders wurde lediglich an- bzw. ausgeschaltet. Dadurch konnte nur ein einziger Steuerbefehl (Einkanalsender) übermittelt werden, wobei in der Regel die Modellsteuerung über eine Befehlssequenz erfolgte: z. B. einmal Tippen bedeutet Links-, ein weiteres Tippen wieder Neutralstellung, das nächste Tippen Rechtsruder, usw., oder (häufiger) erste mal Sender an = Rechtsruder, Sender aus = neutral, nachste mal Sender ein = Linksruder und s weiter. Durch die Auswertung der Signaldauer mit Hilfe komplizierter Techniken (die Rudermaschine „Kinematik“ war ein Beispiel dafür) waren Zusatzfunktionen wie Motorsteuerung ebenfalls möglich. Die "Kinematik" von Graupner lief mit langen Impulsen rechts - neutral (Sender aus) - links - neutral und mit kurzen Impulsen Motor vorwärts - stopp - rückwärts - stopp und so weiter.
Eine für die Weiterentwicklung der Funksteuerung wichtige, aber wenig verbreitete Entwicklung der frühen Fernsteuertechnik, war die damals höchst innovative elektromechanische Einkanal-Proportionalanlage der Firma Webra, die auch unter der Bezeichnung „Flattersteuerung“ bekannt wurde: mit Hilfe eines mechanisch betriebenen Impulsgebers ließ sich das Tastverhältnis HF-Impuls / Pause senderseitig verändern. Das Auswertungsprinzip im Empfängerservo beruhte auf der mechanischen Balance einer Feder-Rückstellkraft und einer Gegenkraft durch einen vom senderseitigen Tastverhältnis gesteuerten Elektromotor.
Die Einführung der Tonmodulation, d.h. einer einfachen Amplitudenmodulation der Sendefrequenz mit niedrigen Tonfrequenzen, aber vor allen Dingen die zunehmende Transistorisierung der Fernsteuerelektronik in der zweiten Hälfte der 1950er-Jahre, revolutionierte die Möglichkeiten der Modellsteuerung: von den funktionssicheren Einkanalanlagen bis hin zur Königsklasse der Zehnkanalanlage, die mit mehreren Tongeneratoren sogar eine Simultansteuerung von bis zu drei Ruderfunktionen erlaubte, reichte die Palette der industriell hergestellten Fernlenkanlagen. Die besseren Fernsteuersender erhielten nun trotz der immer noch vorhandenen Ein/Aus-Beschränkung richtige Steuerknüppel statt einfacher Tipp-Tasten und mit Hilfe der Mehrkanaltechnik war eine realistischere und auch betriebssichere Modellsteuerung möglich.
 Die von Graupner vertriebene tonmodulierte Einkanalanlage mit Sender Bellaphon B und Empfänger Ultraton.
Die von Graupner vertriebene tonmodulierte Einkanalanlage mit Sender Bellaphon B und Empfänger Ultraton.Ab Ende der 1950er-Jahre wurden die vor allem wegen ihrer Batterien schweren Röhrenanlagen allmählich durch leichtere Hybridgeräte und später komplette Transistoranlagen abgelöst – bedingt durch die niedrigen Grenzfrequenzen damaliger Germanium-Transistoren waren die Hochfrequenzstufen der Sende- und Empfangsschaltungen in einer Übergangszeit noch mit Röhren bestückt, für niederfrequente Schaltungsfunktionen (Tongeneratoren, Gleichspannungswandler für die Anodenspannungserzeugung, Schaltverstärker, NF-Verstärker etc.) etablierte sich zusehends die strom- und platzsparende Transistortechnik. Beispiele für bekannte Hybridgeräte waren die weitverbreiteten Sender der süddeutschen Firmen Graupner und Metz (Graupner Bellaphon A bzw. B, Metz Mecatron) und die Einkanal-Empfänger Graupner „Mikroton“.
Die unaufhaltsamen Fortschritte in der Halbleitertechnik ermöglichten seit etwa 1965 komplett elektronisch gesteuerte Proportionalanlagen, bei denen jedes Ruder genau dem Ausschlag der Knüppelbewegung am Sender folgt, womit sich insbesondere Flugmodelle präzise und sicher steuern lassen. Die Proportionalanlagen sind seit ihrem Erscheinen immer weiter bis zur Computeranlage verfeinert worden, an der prinzipiellen Funktionsweise hat sich seither jedoch nichts geändert.
Aktuelle Entwicklung
Der Einsatz der Mikroelektronik erlaubte bald die Übertragung sehr komplexer Steuersignale. Während frühe Steuersysteme zunächst lediglich mit unmodulierter Trägertastung arbeiteten, die später von den betriebssicheren tonmodulierten Fernlenksystemen abgelöst wurden, schließen moderne Systeme zehn oder mehr Digital-proportionale Befehlskanäle ein. Diese RC-Systeme ermöglichen eine proportionale Steuerung – die Steuergröße im gesteuerten Fahrzeug, etwa die Stellung eines Ruders, ist stets proportional zur Position des Steuerknüppels auf dem Sender.
Mit der Einführung digitaler Technik hat der Funktionsumfang aktueller Fernsteuerungen wiederum deutlich zugenommen. Dabei lassen sich etwa Kanäle frei austauschen und ihre Kennlinien verändern oder mit anderen Funktionen mischen. Weiterhin können Servos programmiert werden, um beispielsweise Drehrichtung, Einbauwinkel und Ruderstellungen nach dem Einbau zu justieren, was in analogen Systemen nur über Eingriffe in die Senderelektronik (Funktionsmodule) möglich ist.
Bei Pulscodemodulation (PCM) verringert sich zusätzlich die Störanfälligkeit, da der Datenstrom digital auf Fehler geprüft werden kann. Bei Empfangsproblemen, z. B. im Flug, kann vom Empfänger ein definierter Ruderstand (Fail Safe, Hold) eingestellt werden. Weiterhin kann die Signalübertragung reaktionsschneller sein, da bevorzugt diejenigen Kanalwerte übertragen werden, die sich geändert haben.Neuere Techniken (PCM, Spread Spectrum) aus der Digital- und Computertechnik werden in Zukunft die Übertragungssicherheit weiter verbessern und Zusatzfunktionen (z. B. Telemetrie) ermöglichen. Dem breiteren Einsatz von Spread-Spectrum-Techniken stehen zurzeit noch regulatorische Beschränkungen der Behörden entgegen, sodass diese Technik derzeit ausschließlich auf das ISM-Band beschränkt ist.
Eine erhebliche Weiterentwicklung betrifft die Miniaturisierung der Anlagen. Während ein Fernsteuerungsempfänger von 1955 in Röhrentechnik mit zugehöriger Rudermaschine und erforderlichen Batterien noch etwa 300 g wog und dabei nur eine einzige Funktion steuern konnte, kann heute eine Empfangsanlage in käuflicher Technik mit vier proportionalen Funktionen unter Verwendung eines Lipo-Akkus von 2,6 g mit 5 g realisiert werden. Dabei wiegt der Empfänger weniger als 1 g und die Ruderelemente jeweils etwa 0,35 g. Bei höherem Belastungsbedarf bei größeren Modellen sind natürlich entsprechend stärkere und schwerere Bauelemente erforderlich.
Moderne Fernsteuertechnik
Die Stellung der Hebel oder Regler der Steuerfunktion wird am Sender intern durch Potentiometer oder Schalter abgenommen und in ein elektrisches Steuersignal umgesetzt und auf die HF Sendefrequenz moduliert. Je nach Art des Steuersignals unterscheidet man Pulspausenmodulation (PPM) und die Pulscodemodulation (PCM). Bei den letzteren beiden spricht man von digital-proportionaler Übertragung, da das Steuersignal ein Digitalsignal ist, das wiederum die Stellung der Steuerhebel direkt proportional kodiert.
Bei den HF-Modulationsverfahren unterscheidet man AM- und FM-Übertragungen, sowie neuerdings Spread Spectrum.
Im Empfänger wird die von der Antenne aufgenommenen HF-Energie verstärkt und demoduliert und dadurch das Steuersignal zurückgewonnen. Die Empfänger sind meist als Superheterodyn-Empfänger (Super), oft auch mit doppelter Frequenzumsetzung (Doppelsuper) ausgelegt. Das regenerierte Steuersignal wird anschließend decodiert, um die einzelnen Steuerfunktionen zu trennen und auf separaten elektrischen Ausgängen den entsprechenden Kommandoaufschalteinrichtungen zugeleitet.
Als Kommandoaufschalteinrichtungen können mechanische Rudermaschinen (Servos) oder elektrische Regler, Steller oder Schalter zum Einsatz kommen.
Servos wandeln den Wert der Steuerfunktion in eine proportionale mechanische Bewegung um. Ein Potentiometer misst den Ist-Wert, der mit dem von Sender vorgegebenen Soll-Wert verglichen wird. Der Motor wird nun angefahren, bis der Soll-Wert erreicht ist. Durch die andauernde Nachregelung wird die Position auch bei Belastung gehalten.
Elektrische Steller/Regler wandeln den Wert der Steuerfunktion in ein proportionales elektrisches Signal für einen Verbraucher (meist Elektromotor) um. Für leistungsstarke Elektromotore wird meist die Versorgungsspannung mittels eines elektronischen Leistungsschalters (Transistor) pulsweitenmoduliert. Regler unterscheiden sich durch eine eingebaute Regelschleife. Das elektrische Signal des Verbrauchers wird hierzu durch eine Regelelektronik derartig nachgeregelt, dass eine Kenngröße des Verbrauchers (z. B. Drehzahl des Elektromotors) unabhängig von Umgebungseinflüssen (z. B. Veränderung der Versorgungsspannung, mechanische Belastung) proportional zur Steuerfunktion ist.
Signalstrukturen
Fernsteuerung mit Analogsignalen
Hochfrequenztastung 13,56 und 27,12 MHz
Bei den ersten Röhrenfernsteuerungen wurde das Steuersignal allein durch Ein- und Ausschalten der Hochfrequenz übertragen (A1-Betrieb). Der Hochfrequenzteil der Fernsteuerempfänger arbeitete zunächst ausschließlich nach dem Prinzip des Pendelempfängers, mit dem sich preisgünstig hochempfindliche Empfangsstufen realisieren ließen: ohne ein Hochfrequenzsignal erzeugt das auch als Pendelaudion bezeichnete Schaltungsprinzip eine starke Rauschspannung, wird die Hochfrequenz empfangen, verschwindet das Pendelrauschen. Die Rauschspannung des Pendelempfängers wird verstärkt und bildet die Grundlage zur Ansteuerung eines elektromechanischen Relais.
Mit speziellen Rudermaschinen ('selbstneutralisierend') konnte mit einer festgelegten Steuersequenz bereits ein Modell ferngesteuert werden: geradeaus/nach rechts/geradeaus/nach links/geradeaus/u.s.w.
Manch aufwändiger Rudermaschinen-Mechanik gelang es auch, die zeitliche Dauer der gesendeten Schaltimpulse (lang/kurz) auszuwerten und damit Zusatzfunktionen wie z. B. die Antriebssteuerung des Modells zu beeinflussen.
Einkanal-Proportionalsteuerung
Bereits in den frühen sechziger Jahren des letzten Jahrhunderts fanden Experimente mit einfachen Einkanal-Proportionalsteuerungen (Webra-Picco-Anlage) statt, bei denen mit Hilfe von mechanischen Sendeimpulsgebern das Zeitverhältnis von HF-Einschaltdauer und nachfolgender Sendepause (der Tastgrad) über eine mechanische Stellvorrichtung (Steuerknüppel) variiert werden konnte. Aus diesem Tastverhältnis wurde ein Steuersignal abgeleitet, das in der empfangsseitigen Rudermaschine in passende Ruderausschläge umgesetzt wurde. Durch die Trägheit und die niedrige Wiederholungsrate der Impulsgeber entstanden die für diese Anlagen typischen Flatterbewegungen der angeschlossenen Steuerruder, was zur Bezeichnung „Flattersteuerung“ führte.
Tonmodulation der Trägerfrequenzen 27,12 und 40,68 MHz
Einen großen Fortschritt in der frühen Fernsteuertechnik brachte die Weiterentwicklung der Tonmodulation (A2-Betrieb), deren Grundprinzip einst militärischen Zwecken diente: die Trägerfrequenz des Fernsteuersenders wurde mit der Tonfrequenzspannung eines Niederfrequenz-Oszillators moduliert und im Empfänger mit speziellen Schaltungstechniken in Schaltsignale umgewandelt. Das verbreitete Pendelaudion im Eingangsteil der A2-Fernsteuerempfänger konnte sich zwar trotz seiner unbestreitbaren Nachteile (breitbandige Störstrahlung, mangelhafte Trennschärfe) noch über einen langen Zeitraum behaupten, wurde jedoch zusehends von dem leistungsfähigen und trennscharfen Superheterodynprinzip verdrängt, das durch seine hohe Trennschärfe den gleichzeitigen Betrieb mehrerer Modelle im gleichen Frequenzband ermöglichte.
Ähnlich wie beim analogen Mehrfrequenzwahlverfahren des Telefons sind die Steuerfunktionen bei der Tonmodulation durch auf die Hochfrequenz aufmodulierte unterschiedliche Tonsignalfrequenzen codiert, wobei die Anzahl der vorhandenen Tonfrequenzen der Zahl der Fernsteuerkanäle entspricht.
Den einzelnen Tonsignalfrequenzen werden im Fernsteuerempfänger selektive Ein-Aus-Schaltstufen zugeordnet, die für die Ansteuerung der elektromechanischen Rudermaschinen zuständig sind – eine Proportionalsteuerung ist mit dem System nicht möglich. Mit der Entwicklung der äußerst leistungsfähigen und zuverlässigen Transistor-Tonkreisschaltstufe mit Rückkopplung durch den Münchner Hersteller von Fernsteuergeräten (Graupner-Bellaphon) Hans Schumacher gelang der tonmodulierten Fernsteuerung der endgültige Markterfolg.Damals war die Dreikanalsteuerung der Standard im Fernsteuerbetrieb: Zwei Modulationskanäle sorgten zusammen mit einer selbstneutralisierenden Rudermaschine für die Links-Rechts-Steuerung, über den dritten Modulationskanal ließ sich mit Hilfe spezieller Servotypen eine Motorsteuerung realisieren.
Analoge AM- / FM-Proportionalsteuerung 27 MHz – 40 MHz
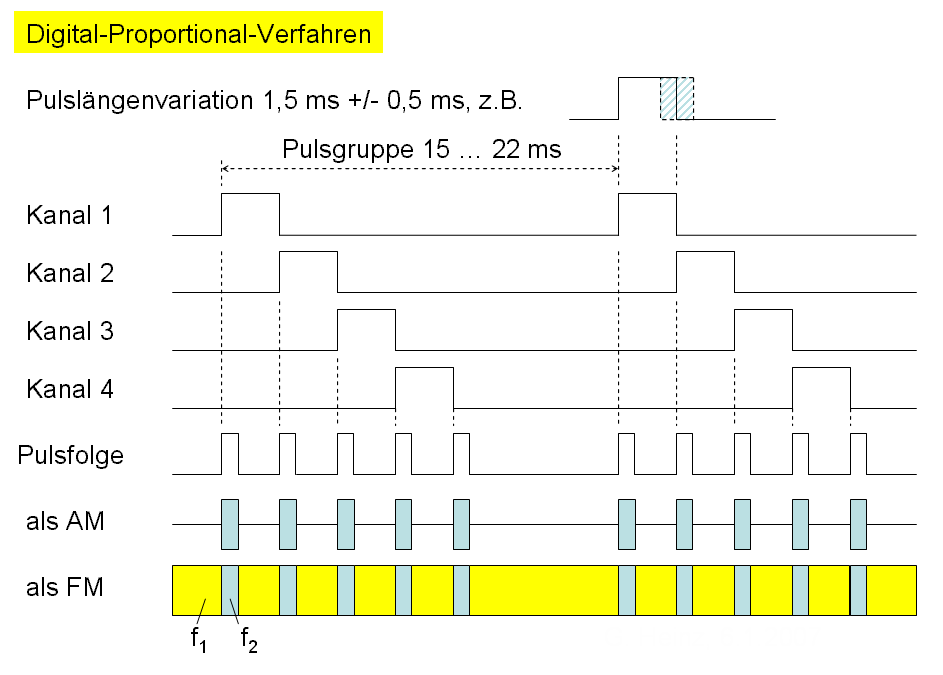
Bei den heute im Schiffs-, Flug- und Auto-Modellbau verwendeten Systemen (27; 35 bzw. 40 MHz) ist die Proportionalsteuerung auf Basis einer Pulsbreitenmodulation Standard. Diese wird meist mit PWM abgekürzt (engl.: Pulse Width Modulation). Der Impuls variiert heute mehrheitlich im Bereich von 1,5 ms ± 0,5 ms (System Multiplex: 1,6 ms ± 0,5 ms). Im zu steuernden Modell bedeuten zum Beispiel 1,0 ms links, 1,5 ms neutral und 2,0 ms rechts oder umgekehrt. Jedem Übertragungskanal ist nur eine Impulsbreite (ein Impuls) zugeordnet, die Impulse aller Kanäle werden zyklisch nacheinander per PPM übertragen.
 Impulsdiagramm
ImpulsdiagrammIm Sender wird jeder Impuls durch einen monostabilen Multivibrator erzeugt; das Potentiometer des Senderknüppels stellt mit einem festen Kondensator ein RC-Zeitglied dar. Im Empfänger besitzt jedes Servo ebenfalls einen monostabilen Multivibrator, wobei das zeitbestimmende Potentiometer hier auf der Drehachse des Servos montiert ist.
Die Differenz zwischen dem vom Sender kommenden und vom Servopotentiometer gelieferten Impuls ist positiv oder negativ und korrigiert die Drehrichtung des Servomotors entsprechend gegensätzlich. Das Servo kommt erst zur Ruhe, wenn Sende- und Servoimpuls gleich lang sind und die Impulsdifferenz zwischen beiden Null beträgt. Je nach Hersteller variiert die Pulsdefinition geringfügig (Systeme Multiplex/JR Propo/Futaba).
Die Impulse mehrerer Kanäle (Funktionen) folgen unmittelbar aufeinander. Zur Übertragung kommen allerdings nicht die Servopulse selbst. Das Ende eines Impulses bedeutet gleichzeitig den Anfang des Nächsten. Nur diese Übergangsflanke wird jeweils fabrikatabhängig als 0,2 ms bis 0,5 ms breiter Impuls gesendet und im Empfangsdecoder decodiert.
Das entstehende Impulstelegramm wird zyklisch wiederholt. Je nach Kanalzahl des Senders und Hersteller (2 bis 12 Kanäle) innerhalb von 15 bis 24 ms. Dabei entsteht eine etwas längere Pause zwischen zwei aufeinanderfolgenden Impulsgruppen, die vom Empfänger zur Synchronisation genutzt wird. Da jeder Kanal innerhalb von 15 bis 24 ms wieder neu übertragen wird, reagiert das Modell sehr schnell, so dass der Steuernde je nach Latenzzeit des jeweiligen Systems das Gefühl einer abrupten oder nur geringst verzögerten Reaktion haben kann.
Vorteil der Technik ist eine mit etwa 5 kHz extrem geringe HF-Bandbreite, gleich ob als Übertragungsverfahren AM oder FM genutzt wird.
Diese genial einfache und leistungsfähige Technik wurde in den sechziger Jahren entwickelt. Erste Empfänger arbeiteten mit Amplitudenmodulation (AM), wobei der Sender teilweise oder vollständig ausgetastet wurde. Probleme mit der schnellen Nachregelbarkeit der Verstärkung des ZF-Verstärkers favorisieren jedoch die Frequenzmodulation (FM), die ab ca. 1970 in die Fernsteuerungstechnik eingeführt wurde. Die Frequenzmodulation kommt mit einem Frequenzhub Δf = f1 − f2 von ca. 4 kHz aus, genug, um einem Frequenzraster von 20 kHz zu genügen.
Fernsteuerung mit Digitalsignalen
PCM
Im Wettkampfbereich setzt sich seit 2000 bei großen Flugmodellen die Pulscodemodulation (PCM) immer mehr durch. Hier werden alle Steuerinformationen als numerische Werte in einem digitalen Datenstrom übertragen. Zusätzliche Prüfbits erlauben eine Fehlerkorrektur und erhöhen die Übertragungssicherheit. Vorteile liegen in erhöhter Störsicherheit (fail save funktioniert bei digital-proportionalen Empfängern nicht sicher) sowie in einer geringeren Nullpunktdrift der Servos und in höherer Präzision der Ausschläge. Nachteil ist ein mehrfach höherer Bandbreitenbedarf, da wesentlich mehr Impulse während eines Frames übertragen werden müssen, was eine höhere Signalfrequenz zur Folge hat. Als Ausweg verwenden FM-PCM-Sender Datenkompressionstechniken, um die Datenmenge während eines Frames zu verringern. Je nach Hersteller werden z. B. nicht geänderte Servokanäle weggelassen oder mit geringerer Wiederholrate gesendet. Systembedingt kann es dadurch zu erhöhten Latenzzeiten kommen. In höher gelegenen Frequenzbändern können PCM-Anlagen höhere Bandbreiten nutzen, um vergleichbar schnell wie digital-proportionale Anlagen sein zu können. So wird beispielsweise das Frequenzband 2,4 GHz mit einem Kanalraster von 1024 kHz genutzt.
PCM im ISM-Band
Mit der Einführung von PCM-Anlagen kam es gelegentlich zu Latenzzeitproblemen. Dies liegt am Dilemma des potentiell höheren Bandbreitenbedarfs. Verschiedenste Versuche scheiterten oft an der Verfügbarkeit geeigneter Frequenzbänder oder preisgünstiger Technologien. Mit der Freigabe von Frequenzen im 2,4-GHz-ISM-Band und der Verfügbarkeit preisgünstiger Komponenten durch die WLAN-Entwicklung im PC-Bereich waren folgerichtig Anwendungen auch zu Fernsteuerzwecken zu erwarten. Aufgrund hochwertiger moderner Modulationsverfahren sind hier bedeutende technische Fortschritte bei der Übertragungssicherheit möglich.
Es gibt mittlerweile von allen namhaften Herstellern unterschiedliche für die Fernsteuerung genutzte Übertragungssysteme wie DSSS und FHSS, und Mischformen, die sich vor allem auch in der in Europa zulässigen Sendeleistung (DSSS 10 mW/MHz, FHSS 100 mW) unterscheiden, nachdem einige Zeit die rechtliche und technische Situation etwas unübersichtlich war.[2][3]
Kleinere Wellenlängen führen aber zu einem neuen Problem, dem der reflexiven Auslöschung, siehe Fresnelzone. Dabei erreicht eine z. B. am Boden reflektierte Welle den Empfänger gegenphasig zur direkten Welle, es kommt zur Signalauslöschung (Dead Points). Abhilfe schaffen dynamische Frequenzbandwechsel (Spread Spectrum) bzw. Diversity-Empfänger. Hier versorgen zwei unabhängige Antennen zwei unabhängige Empfänger, von denen der jeweils höhere Effektivwert dem Impuls-Decoder zugeleitet wird. In modernen Empfängern ist ein Doppelempfänger mit versetzten Antennen bereits integriert.
Komponenten
 Komponenten einer Funkfernsteuerung: Servo, Akku, Empfänger.
Komponenten einer Funkfernsteuerung: Servo, Akku, Empfänger.Eine Funkfernsteuerung ist konzeptionell und meist auch im Aufbau in die Komponenten Sender, Empfänger und Servos oder Steller gegliedert:
Sender
Gängige Sender haben zwei Steuerknüppel, die jeweils nach recht/links und oben/unten bewegt werden können. Eine Steuerfunktion (z. B. Höhenruder) wird auch als „Kanal“ oder „Funktion“ bezeichnet, aus den zwei Steuerknüppeln ergeben sich somit vier Funktionen. Weitere Kanäle werden ggf. über Dreh- und Schieberegler oder Schalter realisiert.
Bei der Handhabung wird zwischen Handsendern unterschieden, bei denen die Daumen in der Regel auf den Steuerknüppeln aufliegen, und Pultsendern, die an einem Gurt getragen werden, und bei denen die Betätigung der Knüppel mit den Fingern bei aufliegendem Handballen erfolgt. Zu Steuerung von Auto- und Schiffsmodellen wird teils eine spezielle „Pistolen“-Bauform eingesetzt, wobei ein Drehring für das Ruder und ein Hebel für Gas/Motor genutzt wird.
Die Stellung der Hebel oder Regler wird intern durch Potentiometer abgenommen, kodiert und in der HF-Stufe auf die Sendefrequenz moduliert.
In Europa sind die Frequenzbänder 27 MHz (Kurzwelle) und 35 MHz (VHF), 40 MHz (UKW), 433 MHz (UHF) und 2,4 GHz (kurze Mikrowellen) für Fernsteuerungen zugelassen, wobei die genaue Frequenz am Sender (bei analogen Sendern, 27, 35, 40, 433 Mhz) durch Quarze festgelegt wird. An modernen Sendern und Empfängern können die Frequenzen mittels PLL-Technik beliebig eingestellt werden. Bei den neuen Übertragungsverfahren, wie Bluetooth oder Spread Spektrum braucht sich Nutzer nicht mehr um einen Kanal zu kümmern. Hier werden die Frequenzen dynamisch eingestellt, bzw. per eindeutiger Sender- und Empfänger-ID zugeordnet. In einigen Ländern sind auch Frequenzen im 41-, 72- und im 75-MHz-Band zur Fernsteuerung von Modellen freigegeben. In Deutschland ist auch das 35-MHz-Band seit 2003 für Flugmodelle anmelde- und gebührenfrei.
In jedem Frequenzband sind nur wohl definierte Frequenzkanäle verfügbar, die soweit auseinander liegen, dass Nachbarkanalstörungen vermieden werden, was speziell bei Flugzeugmodellen fatal wäre. Insbesondere im 27-MHz-Band muss auch mit weiteren Störungen z. B. durch den CB-Funk gerechnet werden, weshalb insbesondere für Flugmodelle das 35-MHz-Band bevorzugt wird.
Programmierbare sogenannte „Computersender“, meist mit LC-Display, ermöglichen die Abspeicherung von Servo-Parametern sowie Mischungen von Kanälen, die vor allem für Hubschrauber- und Flugmodelle gebraucht werden. Meist können Parameter-Sätze für eine Reihe von Modellen abgespeichert und schnell gewechselt werden. Weitere Funktionen hochwertiger Sender sind wählbare Modulationsverfahren (PCM, PPM), per Software wählbare Sendekanäle, austauschbare HF-Module für die unterschiedlichen Bänder oder auch Funktionen zum Scannen freier Kanäle.
Empfänger
Der Empfänger soll geringes Gewicht und zuverlässigen Empfang kombinieren; an ihm werden Antenne, Stromversorgung und ein oder mehrere Servos oder andere Steuergeräte angeschlossen. Die Empfänger sind meist als Superheterodyn-Empfänger (Super), oft auch mit doppelter Frequenzumsetzung (Doppelsuper) ausgelegt. Der Empfänger benötigt einen zur Senderfrequenz (Senderquarz) passenden Empfängerquarz, dessen Frequenz allerdings um den Betrag der ersten Zwischenfrequenz (abhängig vom Empfängertyp) von der Sendefrequenz abweicht, da er die Frequenz des Referenzoszillators einstellt.
Servos und Steller
Servos werden im Allgemeinen nach Gewicht (ab 4 g, Standard 40 g) und Drehmoment (z. B. 25 Ncm) klassifiziert; weitere wichtige Parameter sind Stellzeit (z. B. 0,15 Sekunden für 60 Grad) und Getriebeausführung (Kunststoff/Metall, ggf. Kugellager). In aufwendigeren Servos kommen auch Glockenankermotoren sowie digitale Regelungen zum Einsatz.
Für spezielle Anwendungen gibt es spezielle Servos:
- Segelwinde: Servo zur Betätigung von Seilzügen, meist mit sehr langem Stellweg;
- Stellservo: Servo mit langem Stellweg oder hohem Stellwinkel, meist langsam
- Schaltservo: Servo mit festen oder einstellbaren Endpositionen, nicht proportional;
- Linearservo: Statt einer Abtriebswelle, die sich dreht, gibt es einen Hebel, der verschoben wird. Im Gegensatz zu einem normalen Servo ist der Weg proportional zur Hebelstellung, nicht der Sinus des Weges.
Neben Servos werden zur Umsetzung von Steuersignalen empfängerseitig auch elektrische Steller oder Regler eingesetzt, die bei Modellen mit Elektromotoren etwa die Geschwindigkeit fernsteuern. Neben Spannungs-Stellern werden auch Drehzahlregler eingesetzt, z. B. für Hubschrauber-Modelle, wo die Drehzahl des Motors auch bei veränderlicher mechanischer Belastung konstant gehalten wird. Spezielle Regler für Brushless Motoren regeln das elektrische Drehfeld direkt gemäß der Steuervorgabe (Drehstromregler).
Bei Modellen mit mehreren Motoren können Steller auch zur Richtungssteuerung eingesetzt werden. Beispiele sind z. B. Kettenfahrzeuge mit getrennt angetriebenen Kettenantrieben, zwei- oder mehrmotorige Modellflugzeuge oder Koaxial-Hubschraubern. In diesen Fällen kann auf mechanisch aufwändigere Servos und Ansteuerungen verzichtet werden.
Andere Anwendungen
Heute wird die Funkfernsteuerung auch in der Industrie für die Steuerung von z. B. Laufkränen sowie Rangier- und Kleinlokomotiven verwendet. Funkgesteuerte Roboter werden z. B. für das Entschärfen von Bomben benutzt.
Siehe auch
Einzelnachweise
- ↑ Projekt Aphrodite
- ↑ Aufsatz über die Zulässigkeit von 2,4-GHz-Systemen auf RC-Network vom Februar 2009
- ↑ Seite über die Anwendbarkeit der Norm EN300328V1.7.1 auf Fernsteuerungen
Weblinks
- Fernsteuerfrequenzen weltweit
- Onlinekompendium zum Thema Flugmodellbau
- Kompetenzreferat für Funk im Deutschen Modellflieger Verband
Literatur
- Günter Miel: Elektronische Modellfernsteuerung. Militärverlag der DDR, Berlin, 1976 (Kompendium)
- Lothar Hennicke: RC-Flugmodelle und RC-Modellflug. VEB Transpress Verlag für Verkehrswesen, Berlin 1976 (einfach gehaltene Einführung mit Pulsprotokoll und Schaltungen)
- Gerald Kainberger: Das große Buch des Modellflugs. VTH Verlag, Baden-Baden 2010, ISBN 978-3-88180-793-7.
- Manfred-Dieter Kotting: Moderne Fernsteuerungen für RC-Flugmodelle: Empfänger, Servos, Zubehör. 2,4 GHz und 35/40 MHz. VTH Verlag, Baden-Baden 2000, ISBN 3-88180-780-2.



Wikimedia Foundation.