- Bewegungslernen
-
Als Bewegungslernen (auch englisch motor learning) bezeichnet man die relativ dauerhafte Veränderung eines Bewegungsablaufs (Koordinationsmuster der Muskeln) eines Lebewesens, wenn dies durch die Absicht erfolgt, ein bestimmtes Ziel, das man bis dahin noch nicht erreichen konnte, durch diesen Bewegungsablauf zu erreichen (z. B. ein Hindernis überspringen, einen Ball fangen, eine Fremdsprache sprechen lernen oder nach einem Schlaganfall das Gehen wieder erlernen). Dieser Vorgang muss nicht bewusst sein. Auch die Verbesserung eines Bewegungsablaufs (Ökonomisierung, schnellere, „glattere“ Ausführung) ist ein Bewegungslernen.
Bewegungslernen findet ständig statt, da es auch zur Anpassung an neue Umweltsituationen dient. Insofern ist das Bewegungslernen ein wesentlicher Bestandteil der evolutionären Entwicklung der Lebewesen. Da das Bewegungslernen durch die Sinnesorgane gesteuert (suchen und einschätzen des Ziels) und geregelt wird (ständige „online“ Überprüfung, ob man auf dem richtigen Weg zum Ziel ist), spricht man auch von sensomotorischem Lernen. Berufe, zu deren Ausübung gute Kenntnisse des Bewegungslernens notwendig sind, sind die des Sportlehrers, des Trainers, des Ergo- und des Physiotherapeuten.
Inhaltsverzeichnis
- 1 Gegenstand des Bewegungslernens
- 2 Funktion und biologische Grundlagen
- 3 Forschungsgeschichte
- 4 Bewegungslernen in den Lerntheorien
- 5 Literatur
- 6 Einzelnachweise
Gegenstand des Bewegungslernens
Im allgemeinen verbinden wir mit dem Begriff des Bewegungslernens die Vorstellung des Lernens von Bewegungsabläufen aus dem Bereich des Sports. Auch das Erlernen oder Verbessern von Bewegungsabläufen in der Physiotherapie ist uns geläufig. Dazu gehört z.B. das Lernen (bzw. wieder Erlernen) des Gehens nach z.B. nach einer Verletzung des Bewegungsapparats (Knochenbruch, Gelenk- oder Sehnen-, Bänderverletzung, Amputation) oder des Nervensystems (Schlaganfall, Querschnittlähmung).
Etwas anders verhält es sich mit dem Bewegungslernen in der Ergotherapie, weil es hier weniger darauf ankommt, den physiologischen Ablauf zu üben als vielmehr durch die Bewegung eine Handlung zu vollziehen, die eine bestimmte Bedeutung hat. Auch das ist Bewegungslernen – Bewegungen haben immer einen Zweck, eine Bedeutung.
Das Gehen ist auch ein Beispiel für eine Alltagsbewegung, wie Sprechen, Schreiben, Lasten Tragen etc., die zunächst gelernt werden, dann aber ständig unseren aktuellen Umgebungsbedingungen und Veränderungen unseres Körpers (z.B. Wachstum, Altern) angepasst werden müssen. Ein weiterer Bereich des Bewegungslernens betrifft die beruflichen Tätigkeiten, wie z.B. im Handwerk aber auch bei routinemäßigen industriellen Tätigkeiten. Auch alle künstlerischen Tätigkeiten wie das Tanzen, ein Musikinstrument Spielen, Malen , Bild-Hauen, Akrobatik etc. gehören dazu. Besondere Anforderungen an das Bewegungslernen stellen das Singen (Mund- Rachen- und Körperbewegungen) sowie das Erlernen (Motorik der Aussprache) einer fremden Sprache dar.
Funktion und biologische Grundlagen
Das Bewegungslernen erfolgt durch Imitation, Ausprobieren (ähnlich wie Trial and Error), oder Instruktion. Meist sind alle diese Vorgehensweisen beteiligt.
Die Fähigkeit lebender Organismen, neue Bewegungen zu erlernen und diese neuen Situationen anzupassen, beruht auf der Plastizität des Nervensystems und den biochemischen Eigenschaften der Nervenzellen. Von den Nervenzellen aus werden die Muskeln aktiviert, das bedeutet, es werden Anfang und Ende sowie die Stärke (Intensität) ihrer Anspannung bestimmt.
Um das Verständnis des Zusammenspiels zwischen Nervenzellen und Muskeln zu verstehen, bedarf es der Kenntnis von Aufbau und Funktionsweise von Muskeln und Nerven.
Neuronale Steuerung
Von den motorischen Nervenzellen im Rückenmark, den Motoneuronen ziehen Nervenleitungen zu den Muskelfasern in den Muskeln. Dort enden sie an speziellen Strukturen, den Motorischen Endplatten. Wird ein elektrisches Signal (Aktionspotential) vom Motoneuron über diesen Nerv bis zu den motorischen Endplatten am Muskel gesendet, wird dieses Signal unter Umwandlung in einen chemische Prozess auf den Muskel übertragen. Dort kommt es dann durch spezifische chemische, elektrische und mechanische Prozesse zur Kontraktion der Muskelfasern.
Motorik
Es gibt drei verschiedene Muskeltypen im menschlichen Organismus – die glatten Muskeln, den Herzmuskel und die Skelettmuskeln. Sie unterscheiden sich leicht in ihrem Aufbaus. Der Skelettmuskel ist die Funktionseinheit im menschlichen Organismus, der für die Bewegungen der Körpers verantwortlich ist. Dafür sind zwei seiner Merkmale verantwortlich:
- Er ist kontraktil, d. h. Er kann sich verkürzen (Kontraktion, aktiv) und erschlaffen (passiv).
- Er ist mit mehr als einem Knochen verbunden. Deswegen ist er in der Lage, die Knochen, mit denen er verbunden ist, zu bewegen.
Der Skelettmuskel wird auch als „quer gestreifter Muskel“ bezeichnet, weil seine Feinstruktur im Mikroskop eine Querstreifung zeigt. Der Aufbau, der zu dieser Querstreifung führt, ist dafür verantwortlich, dass sich der Muskel kontrahieren kann.
Ein quer gestreifter Muskel besteht aus mehreren (die Anzahl ist von seiner Größe abhängig) parallelen Muskelfaserbündeln. Er ist von einer Bindegewebshülle, der Muskelfaszie, umgeben. Die Muskelfaserbündel bestehen ihrerseits wiederum aus Muskelfasern, das sind die Muskelzellen. Auch diese wiederum bestehen aus einer größeren Anzahl von parallelen Strukturen, den Myofibrillen, die für die Kontraktion des Muskels verantwortlich sind. Auch diese sind mit einem Bindegewebe eng umgeben und bilden mit diesem eine Funktionseinheit.
Forschungsgeschichte
Seit den 1980er Jahren hat die Bedeutung des Wissens über die Veränderung von Bewegungsabläufen der Lebewesen in den Neurowissenschaften stark zugenommen, weil daran die Entwicklung und Veränderung von neuronalen Netzwerken (s.neuronales Netz) und Gruppen einfacher untersucht werden kann, als das bei kognitiven Abläufen und kognitivem Lernen und Behalten der Fall ist.
Es existieren verschiedene Modelle, die das Bewegungslernen erklären sollen. Diese sind meist eng verbunden mit einer allgemeinen Lerntheorie. Sie werden verändert, wenn neue Erkenntnisse oder Ansichten über das (Bewegungs-) Lernen dies notwendig erscheinen lassen.
Bewegungslernen in den Lerntheorien
Lerntheorien
Die Theorie des Bewegungslernens dient, anders als die allgemeine Lerntheorie meist dazu, eine Vorgehensweise, die häufig auf Überlieferung und/oder Erfahrung beruht und umstritten ist, experimentell zu prüfen und zu bestätigen oder zu widerlegen.
Die Theorien für das Bewegungslernen wurden und werden im Wesentlichen bestimmt durch die in den USA vorherrschenden Theorien – es gibt auch eine Lerntheorie für das Bewegungslernen aus dem sowjetischen Wissenschaftsbereich, die jedoch in den westlichen Staaten nur lückenhaft rezipiert wird. Während die Forschung in der DDR stark auf diesen Forschungsstrang bezug nahm, verhinderte die Auflösung zahlreicher Institute im Zuge der deutschen Wiedervereinigung eine Übernahme dieser Konzepte in die bundesdeutsche Forschung.
Von der Gestalt- oder Ganzheitstheorie, (≈ Kognitivismus in den USA), der ersten wissenschaftlichen Lerntheorie, wird Bewegungslernen nicht behandelt, weil Bewegungslernen nichts Kognitives sei. In der Mitte des 20. Jahrhunderts brachte es jedoch ein Ableger des Kognitivismus, in Form des Österreichischen Schulturnens zu einer zumindest begrenzten Bedeutung auch in Deutschland ( Es wurde von der Sporthochschule Köln in die Didaktik des Sportunterrichts eingegliedert und gelangte in die ersten Nachkriegsrichtlinien des Sportunterrichts für das Land Nordrhein-Westfalen). Karl Gaulhofer und Margarete Streicher hatten dem physiologischen Bewegungsaufbau von Pehr Henrik Ling das natürliche Turnen entgegengestellt, bei dem immer von der Ganzheit eines Bewegungsablaufs ausgegangen wird, ein Lernender also zunächst den gesamten Ablauf – häufig vereinfacht – ausführt, damit er das Bewegungsziel erreicht – also den ganzen Ablauf versteht. Danach können einzelne Teile der Bewegung separat geübt werden. Dieses Konzept war hauptsächlich für das Grundschulturnen gedacht und hat dort seine Berechtigung.
Bewegungslernen im Behaviorismus
→ Hauptartikel: Behaviorismus
Die bis heute einflussreichste Lerntheorie ist der Behaviorismus (behavior, auch: behaviour = Verhalten). Sie entstand zu Beginn des 20. Jahrhunderts in den USA und geht auf Vorstellungen von John Broadus Watson [1] zurück, obwohl meist Edward Lee Thorndike (1874-1949) oder Burrhus Frederic Skinner (1804-1990) als ihre Begründer gelten. Watson ging davon aus, dass sich Lernen wissenschaftlich verantwortungsvoll nur dadurch analysieren lässt, dass das, was objektiv beobachtbar ist, nämlich das Verhalten des Lernenden, präzise beschrieben und ausgewertet wird. Introspektion – das Mittel der kognitiven Lerntheorie – wurde von ihm als unwissenschaftlich abgelehnt.
Erkenntnisse für das Bewegungslernen
Das Bewegungslernen gilt im Behaviorismus als mehr oder weniger komplexe Verkettung einfacher S-R-Verbindungen, bei dem ein bereits erlerntes S-R-Element als Ausgangsreiz für eine nachfolgende S-R-Verbindung dient – das kann jeweils auf klassischem oder operantem Konditionieren beruhen.
Eine Tür aufzuschließen besteht z.B. aus den Einzelverbindungen [2]
- Schlüssel in die Hand nehmen (S: Schlüssel sehen – R: Schlüssel in die Hand nehmen)
- Schlüssel richtig fassen (S: Schlüssel in der Hand halten – R. Schlüssel in die richtige Richtung drehen)
- Schlüssel in das Schlüsselloch einführen
- Schlüssel drehen
- Tür öffnen
Alle diese Einzelverbindungen mussten gekonnt sein, damit sie dann, wenn die gesamte Aufgabe angeboten würde, als Ganzes in einem einzigen Prozess (d.h. spontan, ohne zu üben) ausgeführt werden konnte.
Bei komplexeres Abläufen muss das nicht immer gelingen. Zum Beidpiel: Mit dem Auto rechts abbiegen, wenn die Ampel auf „Grün“ schaltet.
Kette:
- Grünes Licht sehen → Gang einlegen und/oder Gas geben
- Nach rechts umschauen (wegen Radfahrer)
- Lenkrad drehen → Abbiegevorgang kontrollieren
- Lenkrad zurückdrehen
- Fahrt kontrollieren: (Fahrspur einhalten, Richtungsanzeiger zurückgesetzt?, Tempo)
Alle diese Elemente beherrscht der Fahrschüler. Werden sie zum ersten Mal zusammen gefordert, gelingen sie häufig nicht.
Bedeutend sind die Verstärkerpläne von Burrhus Frederic Skinner [3]. Sie werden z.B. in der Physiotherapie (PT) meist unbewusst angewendet: In in der PT Praxis wird durch kontinuierliche Verstärkung, d.h. jede Ausführung wird verstärkt (Richtigkeit bestätigt)der Ablauf am sichersten gefestigt. Später, zu Hause wird nicht mehr jede Ausführung verstärkt, es kommt zu einer Verstärkung in unregelmäßigen Intervallen ( intermittent, variable ratio, wobei die Intervalle immer länger werden können). Das führt zu der sichersten Behaltensform.
Skinner entwickelte ebenfalls das Verfahren einer höheren Form des operanten Kontitionierens: Das Shaping, bei dem das Zielverhalten systematisch erarbeitet wird. Es findet Anwendung in der Tierdressur. Es wird aus dem jeweiligen Verhaltensrepertoire, das das Tier in der Versuchssituation zeigt, die Verhaltensweise verstärkt, die dem Zielverhalten am nächsten kommt. Dadurch wird das Repertoire des Antwortverhaltens des Tieres verändert und dem Zielverhalten angenähert. Auf diese Weise lassen sich – in manchmal langen Prozessen – sehr präzise und auch artfremde Verhaltensweisen vermitteln – nicht nur bei Tieren.
Vor allem in den Arbeitswissenschaften wurde der Zusammenhang zwischen der räumlichen Reizkonstellation und dem Lernerfolg untersucht. Man stellte fest: Bei ungünstiger Anordnung von Elementen, die zu bedienen sind, stellt sich ein Lernerfolg nur verzögert ein und es kommt auch bei Beherrschen des Ablaufs leicht zu Fehlern, z.B. Anordnung der Schalter für die Platten eines Herdes oder wenn ein Element, das mit der rechten Hand manipuliert werden soll, auf der linken Seite des Körpers angebracht ist (Inkompatibilität von Reiz und Reaktion). Diese Kompatibilitätsregeln spielen eine Rolle für das Design von Gegenständen, vor allem für das Industriedesign zur Optimierung von Arbeitsabläufen.
Bewegungslernen in der Kontrolltheorie (Motor Control)
→ Hauptartikel: Kontrolltheorie
Kontrolle bedeutet ständige Überwachung eines Ablaufs, damit dieser erfolgreich abgeschlossen werden kann (von: control engineering = Regelungstechnik). Die Bedeutung der Kontrolle für das Bewegungslernen wurde durch Zusammenarbeit von Bewegungswissenschaftlern mit Ingenieuren um 1940 erkannt (siehe auch Kybernetik), in Deutschland in der Verhaltensphysiologie [4], in den USA bei der Ausbildung von Piloten für den 2. Weltkrieg.
Es war bereits den Behavioristen bekannt, dass ohne die Bestätigung der Richtigkeit (Verstärkung, reward) einer Bewegung, kein Lernen erfolgen kann. Für Bewegungsabläufe galt für sie, dass beim Aufbau einer Bewegungskette, jedes Kettenglied bei seinem Erwerb verstärkt und somit kontrolliert worden war [5] und der Gesamtablauf dann sozusagen automatisch – ohne Einzelkontrolle – ablaufen kann. Es ergibt sich eine Art Bewegungsprogramms, das zunächst in Abschnitten gelernt wird, dann aber unbewusst abläuft.
Wird eine Bewegung nur von außen betrachtet (wie im Behaviorismus), bereitet – trotz des bereits vorhandenen Wissens um physiologische Rückkoppelungsmechanismen, z.B. die Gamma-Schleife der Muskelkontrolle (s. Motorik) – das Verständnis für eine ständige Überwachung von Bewegungsabläufen Schwierigkeiten. Eine Kontrolle schien nicht nützlich, da Korrekturen einer Bewegung nur nach deren Abschluss mit Wirksamkeit für den nächsten Ablauf für möglich gehalten wurden, denn die Zeit für eine Korrektur des Ablaufs dauere zu lange (man ging von ungefähr 200 ms aus), als dass sie während eines Bewegungsablaufs wirksam werden könne. Für langsam ablaufende Bewegungen galt das jedoch nicht. Dort konnte zum Beispiel auch der Ausführende selbst Korrekturen durchführen.
Es wurde deswegen zwischen „open loop“ ablaufenden schnellen Bewegungen, die lediglich nach ihrer Ausführung beurteilt (kontrolliert) und für den nächsten Ablauf korrigiert werden können (z.B. den Wurf eines Balles) und „closed loop“ ablaufenden langsamen Bewegungen, bei denen während des Ablaufs Korrekturen möglich sind (zum Beispiel einen Kreis zeichnen) unterschieden.
Für den langsamen Ablaufs einer „closed loop“ Bewegungsausführung bediente man sich zunehmend der ingenieurmäßigen Darstellung durch Fluss- und Strukturdiagramme, die die Informationsverarbeitung während des Ablaufs darstellen sollen. Obwohl diese Strukturdiagramme eine Aufforderung darstellen, über die Vorgänge im Organismus nachzudenken, weil sie Elemente im Innern der „Organismusbox“ enthalten, die mit physiologischen Erkenntnissen zu füllen wären, taten sich die Behavioristen auch hier schwer, ihre Vorstellung von der Black-Box zu revidieren. Bewegungsprogramme boten eine Lösung dieses Problems an.
Bewegungsprogramme
Zu der damaligen Zeit galten aber Programme (z.B. Computerprogramme) als starr (Vorstellung: Automat: Oben wird Münze ( = der Bewegungswunsch) eingesteckt. Dann kommt immer exakt derselbe Bewegungsablauf heraus). Dies entsprach der Vorstellung des „unbewusst“ ablaufenden Bewegungsablaufs und konnte auch so beobachtet werden. Das war aber unerwünscht, denn Bewegungsabläufe müssen flexibel sein, d.h. sich an unterschiedliche Bedingungen (im Organismus, z.B. Müdigkeit, oder in der Umgebung, z.B. rauer Untergrund) anpassen können.
Das Aufkommen von verzweigten Programmen in den Computerwissenschaften schien dieses Problem der Starrheit der Bewegungsprogramme auf einfache Weise zu lösen.
Die Analogie mit den verzweigten Computerprogrammen führte aber zu dem Problem, wie der Organismus solch ein verzweigtes Programm lernen kann, d.h. sich programmiert: wie weiß er, wo die Abzweigstellen platziert werden müssen und nach welchen Kriterien der eine oder andere Weg eingeschlagen werden muss. Auch die Kontrolle eines solchen Programms muss gelernt werden.
Als ein weiteres Problem ergab sich, dass der Mensch im Laufe seines Lebens sehr viele unterschiedliche Bewegungsprogramme lernen und behalten muss. Diese müssen in einem Langzeitgedächtnis gespeichert werden. Eine gewisse Lösung dieses Problems ließ sich durch die so genannte Schema Theorie erzielen. Diese besagt, dass beim Lernen eines neuen Bewegungsablaufs ebenfalls ein gröberes Schema des Gesamtablaufs ausgebildet wird, so dass die gelernte Bewegung unter ähnlichen Bedingungen nicht völlig neu gelernt, sondern nur angepasst werden und als solche gespeichert werden muss. Beispiel: Wir lernen das Schreiben mit der rechten Hand. Wir können es dann aber auch nicht nur an der Tafel korrekt ausführen, sondern sogar mit der linken Hand oder mit dem Fuß einigermaßen leserlich, obwohl wir dazu ganz andere Muskeln aktivieren müssen, als die, mit denen wir das Schreiben gelernt haben. Intensiv mit dieser Schema-Theorie hat sich Richard A. Schmidt [6] auseinandergesetzt.
Einen wichtigen Beitrag zum Verständnis der Kontrolle für menschliches Handeln lieferten die Psychologen G. Miller, E. Galanter K. Pribram [7] mit ihrem TOTE (Test-Operate-Test-Exit) Modell.
Einen Ansatz, auch die physiologischen Grundlagen der Bewegungskontrolle zu erklären und zu verstehen, bietet Erich v. Holst mit dem Reafferenzprinzip [8].
Bewegungslernen in der Theorie der Informationsverarbeitung
Von Psychologen war die Kontrolltheorie in den 60-ger und 70-ger Jahren zur Theorie der Informationsverarbeitung im menschlichen Organismus weiter entwickelt worden. Diese half einige Probleme aus der Kontrolltheorie zu lösen.
In der Theorie der Informationsverarbeitung wird wie in der Kontrolltheorie das menschliche Handeln als Strukturdiagramm dargestellt, die einzelnen Elemente aber mit den entsprechenden physiologischen und neurophysiologischen Inhalten gefüllt. Diese geben Auskunft darüber, in welcher Weise die Informationen, die aus der Umwelt auf den Organismus treffen, verarbeitet werden bevor das Ergebnis auf die Umgebung einwirkt. Die Psychologen beschränken sich dabei hauptsächlich auf Wahrnehmung und Gedächtnisses [9].
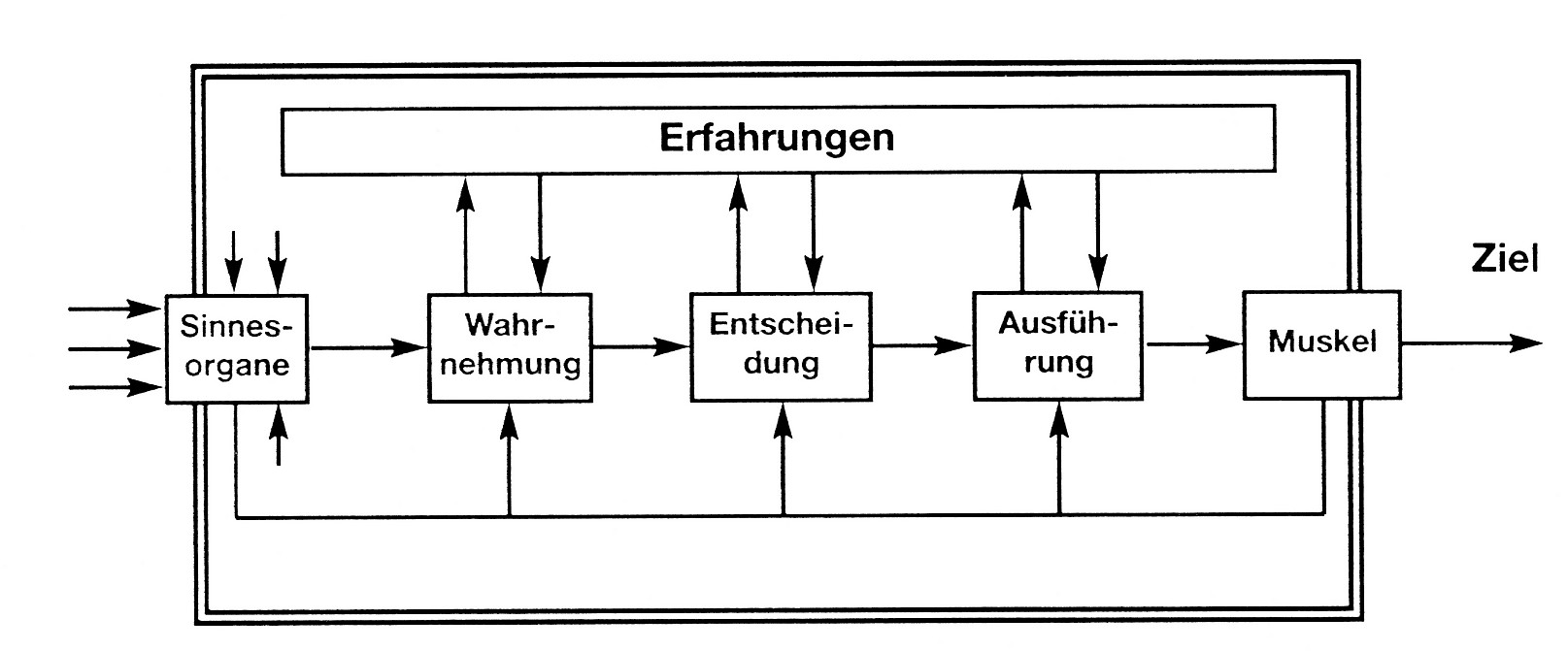
 Modell zur Theorie der Informationsverarbeitung
Modell zur Theorie der Informationsverarbeitung
Für die Bewegungswissenschaftler ist aber besonders die Ausführung der Handlung/Bewegung mit der Vorbereitung und Kontrolle der Muskeltätigkeit von Bedeutung. Der Kanadier Ronald G. Marteniuk [10]hat 1976 auf Vorarbeiten von H.T.A. Whiting [11] diesen theoretischen Ansatz für das Bewegungslernen umgesetzt. Dieser wurde von Heidrun Schewe [12] in Deutschland bekannt gemacht.
Das Modell
Es ergibt sich eine Struktur mit 5 Hauptelementen:
Über die ''Sinnesorgane'' werden die Signale (Informationen) aus der Umwelt in das Nervensystem aufgenommen. Das ist ein rein biologischer Vorgang.
Im nächsten Schritt – Beginn der kognitiven Verarbeitung – werden die für die spezifische Bewegung wichtigen Informationen herausgefiltert und so gruppiert, dass die Situation, in der sich der Organismus befindet, identifiziert werden und ihre Bedeutung für die augenblickliche Situation bzw. für eine geplante Handlung erkannt wird. Am Ende dieses Schrittes, den man als Wahrnehmungsbereich (Wahrnehmung) (perception mechanism) bezeichnet, steht die Klassifizierung der Gesamtsituation.
Kann die Situation eindeutig einer bestimmten bereits bekannten Klasse von Situationen zugeordnet werden, und es liegt nur eine einzige Handlungsalternative vor, kann diese abgerufen und ausgeführt werden. Ist eine eindeutige Klassifizierung nicht möglich oder existieren mehrere Alternativen (wie z.B. in einem Sportspiel, oder für eine Autofahrt verschieden Fahrtrouten), muss eine adäquate oder erfolgreiche Lösungsstrategie ausgewählt oder gesucht werden. Diese muss für eine Entscheidung (decision) dafür (geistig) durchgespielt und auf ihre Konsequenzen hin überprüft werden. Dies kostet Zeit. Ist diese nicht vorhanden oder der Ausführende ungeduldig, kann es zu Fehlentscheidungen kommen, die zum Scheitern der Bewegung führen. Ist eine Lösungsstrategie gefunden, deren Konsequenzen akzeptiert werden können, wird diese Bewegungsabsicht an den Ausführungsbereich übergeben.
Im Ausführungsbereich (effector mechanism) werden die Ablaufmuster der Bewegung zusammengestellt. Ist die beabsichtigte Bewegung schon öfter ausgeführt worden – das ist meistens der Fall, da wir vom Kindesalter an Bewegungserfahrungen sammeln, und für alle unsere Muskeln geeignete Innervierungsmuster vorliegen, so dass im Erwachsenenalter völlig neue Bewegungen kaum mehr vorkommen – müssen die dazu notwendigen Bewegungsmuster lediglich bereit gestellt und aktiviert werden. Ist die beabsichtigte Bewegung neu oder relativ neu – müssen für sie geeignete Muster (Teilmuster) gesammelt und miteinander koordiniert werden.
Der letzte Teilabschnitt, das Muskelsystem, ist für die Umsetzung der kognitiven Ergebnisse in den mechanischen Bewegungsablauf zuständig. Dieser läuft unter ständiger Kontrolle ab.
In jedem Verarbeitungsschritt ist ein Rückgriff auf alle zurückliegenden Verarbeitungsschritte möglich. Sie werden ständig mit der Umgebungssituation und dem beabsichtigtem Ziel abgeglichen.
Den Abschluss des Gesamtablaufs bildet die Feststellung, ob das beabsichtigte Ziel erreicht wurde oder nicht. Entsprechend wird der Ablauf als positiv oder negativ gespeichert (knowledge of result) = Bewertung. Dieses Modell lässt auch eine Detailanalyse des Gesamtablaufs sowohl für den Lehrenden als auch für den Lernenden zu (knowledge of performance) zu. Die Bedeutung dieser Rückkopplungsmechanismen wird eingehend von A. Gentile [13] diskutiert, ebenfalls von H. Schewe [14]
Die Vorteile dieser Theorie für Ausführende und Lehrende besteht in der Möglichkeit, die Entwicklung und Durchführung eines Bewegungsablaufs in ihren einzelnen Schritten verfolgen und analysieren zu können. Das ist für Planung, Analyse, Beurteilung und Korrektur, besonders beim Lernen der Bewegung, wichtig. Durch Einbeziehung zusätzlicher psychologischer Erkenntnisse (z.B. Aufmerksamkeit für die Wahrnehmung) lassen sich Leistungsunterschiede bei der Ausführung erklären und Einfluss auf sie nehmen.
Das Problem aus der Kontrolltheorie, wie neue Programme und deren Kontrolle gelernt werden können, wird durch den Rückgriff auf die Bewegungserfahrungen des Einzelnen gelöst.
Nicht gelöste Probleme
Es bleibt das Problem des Speichers, denn auch in dieser Theorie wird die Computeranalogie verwendet, bei der die einzelnen Verarbeitungsschritte bestimmten Hirnregionen zur Verarbeitung zugewiesen werden und beim Lernen ein bestimmter Algorithmus für diesen Bewegungsablauf hergestellt wird, der später in nahezu identischer Weise abgerufen werden kann.
Es kann auch nicht die Frage geklärt werden, die sich für alle Lehrenden und Therapeuten stellt, ob am Lernbeginn immer derselbe Ablauf vom Lernenden gefordert werden soll (Vorwurf: führt zu starrem (stereotypem) Ablauf) oder ob es für die geforderte Anpassungsfähigkeit der Bewegung an wechselnde Bedingungen zweckmäßiger ist, von Anfang an einfache Bewegungsvariationen einzubeziehen.
Eine weitere Frage ist die danach, wie viel von all den geschilderten Schritten, die zweifellos notwendig sind, um einen Bewegungsablauf erfolgreich ausführen zu können, bewusst sind bzw. bewusst werden müssen.
Bewegungslernen in der Theorie der Neural Group Selection
Waren die Thesen der bisher beschriebenen Theorien aus experimentellen Untersuchungen des Verhaltens abgeleitet, zieht die Theorie der Neural Group Selection (TNGS) (siehe Evolution) ihre Schlüsse unmittelbar aus den Untersuchungen des Gehirns und dessen Tätigkeit.
Neue Fragen und Zweifel – z.B. wie die Klassen von Handlungen/ Bewegungen, nach denen man sich für eine bestimmte Ausführung entscheidet, entstanden sein könnten, da dazu eine entsprechende Vorstrukturierung vorhanden sein muss; dass Varianten von Bewegungen – zur Anpassung an neue Umgebungsbedingungen – nur in einer Breite von natürlichem Rauschen vorstellbar waren; und dass sich auf neuronaler Ebene (siehe Nervenzelle) nicht erklären ließ, warum große Mengen an neuronalen Verbindungen bei Bewegungen brach zu liegen scheinen – machten neue Überlegungen notwendig.
Lernen von Bewegungen
Nach der Theorie der Neural Group Selection (TNGS) (siehe Evolution)[15] folgt, dass alle Prozesse (mentale und motorische) – jeder Denkprozess, jede Handlung und jede Bewegung – nicht nach erlernten, im Gehirn in repräsentativer Form vorliegenden Programmen, sondern nach dem evolutionären Selektionsprinzip geplant, entwickelt, koordiniert und ausgeführt werden. Es wird also jeder Ablauf völlig neu aufgebaut und zusammengestellt. Dabei werden vorhandene neurale Verbindungen genutzt u8nd gleichzeitig verändert. Das gilt auch für das Bewegungslernen.
Das Prinzip ist es, jeweils eine geeignete Auswahl aus einer sehr großen (mehrere Milliarden Elemente) Population (im Organismus: Populationen von Synapsen an Neuronen (siehe Nervenzelle, Neuronennetzwerken und Gruppen von Neuronennetzwerken, zu Gruppierungen, Repertoires und Karten)). Diese jeweiligen Gruppierungen innerhalb eines Repertoires sind ähnlich aber nicht gleich (Degeneracy), so dass auch bei unterschiedlicher Auswahl die gleiche Leistung zustande kommen kann. Durch ständigen rekursiven Austausch zeitgleich aktiver Neuronengruppen in den reziprok verschalteten Regionen, die über den gesamten Cortex (siehe Großhirnrinde) verteilt sind (Reentry), werden die sensorischen und motorischen Ereignisse räumlich und zeitlich koordiniert.
Die jeweils getroffene Auswahl ist bei jeder Ausführung eine andere und sie ist in der Regel keine exakte, sondern eine ausreichend gute Lösung, die durch die aktuelle ständige Überprüfung und Veränderung der Synapsen optimiert wird und auf höchster Könnensstufe nahezu optimal sein kann.
Bei diesem Verfahren können auch völlig neue Abläufe erfolgreich ausgeführt werden. Diese benötigen mehr Zeit für ihre Planung und Vorbereitung (Auswahl und Koordination durch Reentry). Sie sind auch weniger präzise. Aber durch Wiederholung (Üben) wird die Auswahl verbessert, und die Koordination kann sparsamer und schneller ablaufen.
Soll ein neuer Bewegungsablauf gelernt werden, ist es deswegen sinnvoll, von vorneherein Variationen der Ausführung vom Lernenden zu fordern, damit mehr geeignete Verbindungen für die Auswahl der jeweiligen optimalen Lösung zur Verfügung stehen.
Gelöste Probleme
Durch diese Theorie ist das Problem des Gedächtnisses als repräsentativer Speicher aller gelernten Bewegungsabläufe gelöst, da jede Bewegung aus den am besten geeigneten Verknüpfungen neu zusammengestellt und optimiert wird.
Es wird ebenfalls die Beobachtung bestätigt und erklärt, dass am Beginn des Lernens von Bewegungen das Bewusstsein in stärkerem Maß beteiligt ist als auf höheren Stufen des Könnens. Der Bewegungsablauf wird im Zuge häufiger Wiederverwendung (Übung) automatisiert, wie man sagt. Es wird dann weniger Aufmerksamkeit d.h. auch Energie für den Ablauf benötigt wie z.B. für Alltagsbewegungen [16]). Das bedeutet aber nicht, dass er ohne Kontrolle abläuft.
Diese Theorie eignet sich ebenfalls, viele der aus der behavioristischen Lernforschung widersprüchlichen Untersuchungsergebnisse zu erklären (z.B. massed oder distributed practice).
Vorstellungshilfe: Auf der letzten Stufe der Ausführung werden Muskeln aktiviert. Ein Muskel besteht aus einer sehr großen Anzahl motorischer Einheiten (siehe Motorik). Diese motorischen Einheiten werden von Motoneuronen im Rückenmark innerviert. Es wird aber für jede Bewegung nur eine begrenzte Zahl von motorischen Einheiten benötigt. Man überlege sich, ob für eine Kontraktion des Muskels, bei der eine vorgegebene definierte Kraft aufgebracht werden soll, immer die selben motorischen Einheiten aktiviert werden (Programmvorstellung) oder ob es durch Auswahl (siehe Evolution) geeigneter, aber jeweils anderer motorischer Einheiten nicht ebenfalls zu dem geforderten präzisen Output (Leistung) kommt.
Literatur
- Richard A. Schmidt, Timothy D. Lee: Motor Control and Learning, 4. Aufl. Champaign IL 2005
- Anne Shumway-Cook, Marjorie H. Woollacot: Motor Control, 3. Aufl. Philadelphia 2007. S. 22.
- Gerald M. Edelmann: Neural Darwinismus, New York 1987, Kap. 8.
- M. Schünke et al.: Prometheus. LernAtlas der Anatomie, 2. Aufl. Stuttgart 2009. S.56.
- Heidrun H. Schewe: Die Bewegung des Menschen, Stuttgart 1988.
- John Broadus Watson. Behaviorismus. Deutsche Übersetzung: Köln 1968
- Robert Mills Gagné, Die Bedingungen des menschlichen Lernens, Schroedel Verlag, 1969. S.103"
- C. Ferster, B. Skinner. Schedules of Reinforcement, New York 1957
- Erich v. Holst. Zur Verhaltensphysiologie bei Tieren und Menschen, gesammelte Abhandlungen Bd. 1 und 2. Piper paperback München 1970
- Richard A. Schmidt. A Schema Theory of discrete Motor Skill Learning. In: Psychological Review 82 (1975). S.225-260
- G.A. Miller, E. Galanter, K. H. Pribram. Plans and Struktures of Behavior. London 1960. Deutsch: Strategien des Handelns. Pläne und Strukturen des Verhaltens. Stuttgart 1974
- Peter H. Lindsay, Donald A. Norman. „Human Information Processing, an Introduction to Psychology“. Academic Press New YorkLondon 1977
- Ronald G. Marteniuk. Information Processing in Motor Skills. Holt Rinehart and Winston New York 1976
- H.T.A. Whiting Hrsg. Readings in Human Performance. London 1975.
- A.M. Gentile: A Working Model of Skill Akquisition with Application to Teaching. In: Quest 17. 1972 S. 42-45
- Heidrun Schewe. Wege zum Verständnis von Bewegung und Bewegungslernen. In: B. Lipp, W. Schlegel, K. Nielsen, M.Streubelt. Gefangen im eigenen Körper – Lösungswege / Neurorehabilitation Neckar-Verlag Villingen Schwenningen 2000
- Gerald M. Edelmann, Giulio Tononi. Gehirn und Geist, wie aus Materie Bewusstsein entsteht, C.H. Beck Verlag oHG. München 2002 S. 68
Einzelnachweise
- ↑ John Broadus Watson. Behaviorismus. Deutsche Übersetzung: Köln 1968
- ↑ "nach: Robert Mills Gagné, Die Bedingungen des menschlichen Lernens, Schroedel Verlag, 1969. S.103"
- ↑ C. Ferster, B. Skinner. Schedules of Reinforcement, New York 1957
- ↑ Erich v. Holst. Zur Verhaltensphysiologie bei Tieren und Menschen, gesammelte Abhandlungen Bd. 1 und 2. Piper paperback München 1970
- ↑ siehe auch: Richard A. Schmidt, Timothy D. Lee. Motor Control and Learning. A behavioral Emphasis 4. Auflage Human Kinetics Publishers Champaign IL 2005. S.164
- ↑ Richard A. Schmidt. A Schema Theory of discrete Motor Skill Learning. In: Psychological Review 82 (1975). S.225-260
- ↑ G.A. Miller, E. Galanter, K. H. Pribram. Plans and Struktures of Behavior. London 1960. Deutsch: Strategien des Handelns. Pläne und Strukturen des Verhaltens. Stuttgart 1974
- ↑ Erich. v. Holst, Horst Mittelstaedt. Das Reafferenzprinzip. In: Naturwissenschaften 37 (1950) S. 464-476
- ↑ Peter H. Lindsay, Donald A. Norman. „Human Information Processing, an Introduction to Psychology“. Academic Press New YorkLondon 1977
- ↑ Ronald G. Marteniuk. Information Processing in Motor Skills. Holt Rinehart and Winston New York 1976
- ↑ H.T.A. Whiting Hrsg. Readings in Human Performance. London 1975.
- ↑ Heidrun Schewe, Die Bewegung des Menschen. Thieme Verlag Stuttgart 1988
- ↑ A.M. Gentile: A Working Model of Skill Akquisition with Application to Teaching. In: Quest 17. 1972 S. 42-45
- ↑ Heidrun Schewe. Wege zum Verständnis von Bewegung und Bewegungslernen. In: B. Lipp, W. Schlegel, K. Nielsen, M.Streubelt. Gefangen im eigenen Körper – Lösungswege / Neurorehabilitation Neckar-Verlag Villingen Schwenningen 2000
- ↑ Gerald M. Edelmann. Neural Darwinism. The Theory of Neural Group Selection, Basic Books, Inc. Publishers New York 1987
- ↑ Gerald M. Edelmann, Giulio Tononi. Gehirn und Geist, wie aus Materie Bewusstsein entsteht, C.H. Beck Verlag oHG. München 2002 S. 68
Wikimedia Foundation.