- Steuerungstechnik
-
Die Steuerungstechnik umfasst den Entwurf und die Realisierung von Steuerungen. Sie ist ein Teilgebiet der Automatisierungstechnik.
Die Steuerung ist ein Plan, nach dem die in technischen Produkten (Geräte, Apparate, Maschinen, Anlagen und biologische Systeme) vorkommenden, prinzipiell veränderlichen (dynamischen) Größen beeinflusst werden.
Abhängig von Eingangsgrößen (zum Beispiel Stellung einer Schalter-Wippe, eines Handrades, Mischhebels oder Drehknopfes ) werden Ausgangsgrößen (zum Beispiel Beleuchtung, Temperatur, Druck oder Drehzahl) mittels eines Aktors (zum Beispiel Schalter, Ventil oder Motor) eingestellt.
Im Gegensatz zur Regelung fehlt bei der Steuerung die Rückkopplung der Ausgangsgröße auf den Eingang. Wenn aber bei der Kommunikation zwischen Mensch und Maschine auf Grund einer angezeigten Ausgangsgröße die Eingangsgröße verändert wird, so findet eine Regelung mit dem Menschen als Regler statt.
Die Zustandsgrößen am Ein- und Ausgang können sowohl analog als auch digital (im besonderen binär) sein. Binäre Zustände sind zum Beispiel die Ein- und Ausgangsgrößen einer Beleuchtung: Der Schalter hat zwei Lagen, das Licht ist ein- oder ausgeschaltet. Werden Steuerungen zur Überwachung eingesetzt, so ist die Ausgangsgröße ebenfalls binär: Erreicht die zu überwachende Größe (Eingangsgröße) einen gefährlichen Wert, so wird ein Prozess oft abgeschaltet (die Ausgangsgröße erhält den Zustand LOW).
Inhaltsverzeichnis
Grundlagen
Das folgende Schema zeigt die wesentlichen Komponenten von steuerungstechnischen Einrichtungen und ihren Informationsfluss:
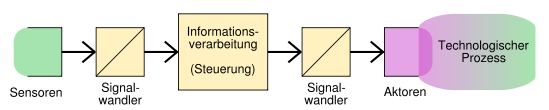
In steuerungstechnischen Einrichtungen werden Informationen übertragen und verarbeitet. Überwiegend ist der Informationsträger elektrische Spannung, seltener hydraulischer oder pneumatischer Druck.
Sensoren wandeln Prozesszustände in Informationen um und sind dadurch Informationsquellen. Dagegen sind Aktoren Informationssenken: Sie wandeln Informationen in Prozessenergie um.
Die von Sensoren abgegebenen Informationen werden so gewandelt, dass sie sich für den jeweiligen Übertragungsabschnitt eignen und von der Steuerung als Eingangsgröße verarbeitet werden können. Ausgegebene Informationen werden auch gewandelt, bevor die Aktoren in den Prozess eingreifen.
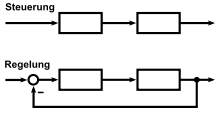
Abgrenzung zwischen Steuerung und Regelung
 Abgrenzung zwischen Steuerung und Regelung
Abgrenzung zwischen Steuerung und Regelung
Im Gegensatz zur Regelung fehlt bei der Steuerung die fortlaufende Rückkopplung der Ausgangsgröße auf den Eingang des Reglers (Regeleinrichtung). Aufgrund der nicht vorhandenen Rückführung des Istwertes wird in der Technik von einer offenen Wirkungskette oder auch Steuerkette gesprochen.
Beispiel:
- Ein Gleichstrommotor wird mit einem Vorwiderstand so eingestellt, dass er im Leerlauf 1000/min läuft. Tritt eine Last auf, sinkt die Drehzahl. Der Elektromotor ist in diesem Fall gesteuert.
- Wenn die Aufgabe besteht, unabhängig von der Last eine konstante Drehzahl herzustellen, ist eine Regelung notwendig: Der Istwert wird mit einem Drehzahlsensor erfasst. Der Regler erkennt die Abweichung des Istwertes vom Sollwert und wirkt so auf einen Aktor (Stromrichter) ein, dass die Störeinflüsse ausgeglichen werden. Dadurch entsteht eine negative Rückkopplung, ein geschlossener Regelkreis. Solche Anordnungen gehören zum technischen Wissensgebiet der Regelungstechnik.
- Control
In der englischen Literatur wird sowohl für Regelung als auch für Steuerung das Wort control verwendet. Bei Übersetzungen wird dieses Wort oft mit „Steuerung“ übersetzt. Im Englischen wird die genaue Bedeutung jedoch nur dann ersichtlich, wenn ausdrücklich von einer open loop control („Steuerung“) oder closed loop control („Regelung“) gesprochen wird, sonst ist die Kenntnis des Kontextes für die richtige Übersetzung als „Steuerung“ oder „Regelung“ erforderlich.
In der deutschen Umgangssprache werden Regelung und Steuerung häufig nicht genau unterschieden. Diese Ungenauigkeit zieht sich auch in Fachsprachen, die dieser präzisen Abgrenzung nicht bedürfen: In der Betriebswirtschaftslehre umfasst Steuerung einerseits Maßnahmen zur Erreichung vorgegebener Ziele im Rahmen der Führung, Leistungswirtschaft, Verwaltung und im Controlling, z. B. als Vorsteuerung – nämlich vor dem Eintritt von Störungen, Steuerung im eigentlichen Sinne – und als Nachsteuerung (Regelung im technischen Sinne), z. B. nach Vergleich der Sollwerte mit den Istwerten, um aus den Ergebnissen neue Maßnahmen abzuleiten.
Binäre Signale
Prozesszustände sind zweiwertig (binär), wenn sie nur 2 mögliche Wahrheitswerte haben, wie z. B. "Taste gedrückt" bzw. "nicht gedrückt", Gegenstand vorhanden bzw. nicht vorhanden. Die beiden Wahrheitswerte werden durch definierte Zustände eines Informationsträgers abgebildet, z. B. „nicht gedrückt“ entspricht 0 V, „gedrückt“ entspricht 24 V. Diese Zustände werden mit {0,1} oder {falsch, wahr} beschrieben.
Analoge Signale
Prozesszustände sind kontinuierlich, wenn sie durch eine reelle Zahl abgebildet werden können, z. B. Temperatur = 65,5 °C. Ein kontinuierlicher Prozesszustand wird vom Sensor in ein analoges Signal umgesetzt. Wenn das Steuergerät den Zahlenwert des analogen Signals benötigt, ist eine Analog-Digitalwandlung erforderlich.
Analoge Signale werden zur Regelung, zur Anzeige oder zur Überprüfung von Grenzwerten benötigt. Eine Grenzwertprüfung von physikalischen Größen führt zu der binären Information: Grenzwert erreicht/nicht erreicht.
Steuerungstypen
Nach Art der Signalverarbeitung wird unterschieden in:
- Sequenzielle Steuerung (Ablaufsteuerung): Ablauf einzelner Schritte nach logischen Entscheidungen
- z. B: wenn dieser Zustand auftritt, wird ein bestimmter Zustand ausgegeben
- Zeitprogramm-Steuerung: Ablauf der Ereignisse nach einem Zeitschema
- z. B.: bei einer Verkehrsampel
- Wegprogramm-Steuerung: Ablauf der Ereignisse nach einem Wegschema
- z. B.: CNC-Fräs-/Drehsteuerung
Einteilung von Steuerungen nach ihrem Aufbau:
- Verbindungsprogrammierte Steuerung
- mechanische Steuerung: z. B. Steuerung (Dampfmaschine)
- elektrische Steuerung: z. B. Kontakte und Relais
- pneumatische, hydraulische Steuerung
- elektronische Steuerung: z. B. Logikgatter, Programmierbare logische Schaltung
- Speicherprogrammierbare Steuerung (SPS): z. B. Mikrocontroller
Sie ist heute der am meisten verwendete Steuerungstyp.
Entwurf einer Steuerung
Steuern bedeutet, dass jeder möglichen Kombination von Eingangsgrößen entsprechend dem Steuerungszweck der Wahrheitswert für jeden Ausgang zugeordnet wird. Dargestellt werden diese Zuordnungen am ausführlichsten in einer Wahrheitstabelle.
Nach einer möglichen Vereinfachung mit den Regeln der Booleschen Algebra oder dem Karnaugh-Veitch-Diagramm kann das Ergebnis direkt zur Realisierung des Steuergerätes dienen.
Wahrheitstabelle
E1 E2 UND
A1ODER
A2EXCL-ODER
A30 0 0 0 0 0 1 0 1 1 1 0 0 1 1 1 1 1 1 0 Die nebenstehende Wahrheitstabelle hat 2 Eingänge und daher 22 = 4 mögliche Kombinationen. Es sind mit den Ausgängen A1 bis A3 die 3 wichtigsten Verknüpfungen dargestellt. Tabellen mit mehreren Ausgängen sind eine verkürzte Darstellung von entsprechend vielen Tabellen mit nur einem Ausgang. Eine Tabelle mit 2 Eingängen kann 16 verschiedene Verknüpfungen haben (siehe Boolesche Funktion).
Anhand des folgenden Beispiels soll der Steuerungsentwurf näher betrachtet werden:
- Ein Patient kann durch Drücken einer Ruftaste über eine Leuchtanzeige die Krankenschwester rufen. Anders als bei einer Türglocke muss der Tastendruck zu einer dauerhaften Meldung führen, um auch dann noch bemerkt zu werden, wenn die Ruftaste nicht mehr gedrückt ist. Die Leuchtanzeige wird von der Krankenschwester mit einer Rückstelltaste gelöscht.
Die Problemstellung des Beispiels verlangt Speicherverhalten, so dass in der Wahrheitstabelle neben den Sensoren (E1 und E2) auch der Aktorzustand selbst als Eingang hinzugefügt werden muss (E3). Dadurch erhält die Tabelle 23 = 8 Zeilen.
Ruftaste
E1Rückstelltaste
E2Meldung
E3Meldung
A11 1 1 1 1 2 1 1 0 1 3 1 0 1 1 4 1 0 0 1 5 0 1 1 0 6 0 1 0 0 7 0 0 1 1 8 0 0 0 0 Aus den Zeilen 1 bis 4 ist zu erkennen, dass bei gedrückter Ruftaste (E1 = 1) immer die Anzeige leuchtet (A1 = 1), die beiden Eingänge E2 und E3 also keine Rolle spielen. Die Zeilen 5 und 6 zeigen, dass die Rückstellung (A1 = 0) von Eingang E3 unabhängig ist. In den Zeilen 7 und 8 steckt das Speicherverhalten der Steuerung: Die Leuchtanzeige behält ihren (alten) Zustand bei (A1 = E3), wenn beide Taster den Zustand 0 haben.
Daraus ergibt sich: Die Leuchtanzeige leuchtet nur, wenn die Ruftaste gedrückt ist, oder wenn die Rückstelltaste nicht gedrückt ist und die Leuchtanzeige leuchtet.
Weitere Darstellungsformen
Üblich sind die folgenden Darstellungen dieser Aussage:
- Ausdruck der Booleschen Algebra (Schaltalgebra):

 steht für ODER,
steht für ODER,  für UND, — für NICHT
für UND, — für NICHT
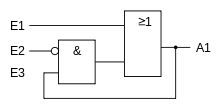 Logikplan
Logikplan- Funktionsplan (Logikplan):
≥1 steht für ODER, & für UND, O für NICHT
Für die Grundverknüpfungen gibt es genormte Symbole, die ausführlich im Artikel Logikgatter beschrieben sind.
Während der Funktionsplan an eine Schaltung aus elektronischen Schaltgliedern angelehnt ist, unterstützt der Kontaktplan den Aufbau der Steuerung mit Hilfe von Relais.
 Kontaktplan
Kontaktplan Kontaktplan in Programmen
Kontaktplan in Programmen- Kontaktplan:
Hier wird wie bei einem Schaltplan eine Parallelschaltung für ODER, Reihenschaltung für UND, Öffner für NICHT verwendet.
LDN E2 A A1 O E1 = A1
LD E2 R A1 LD E1 S A1
Anweisungsliste Variante 1 Variante 2 - Anweisungsliste einer SPS:
LD steht für Lade, N für NICHT,
A für UND, O für ODER,
S für Setzen (speichernd), R für Rücksetzen
Bei gesteigerter Komplexität gegenüber dem Beispiel und insbesondere bei Rückführung von Ausgängen auf Eingänge, spricht man von endlichen Automaten, die in einem eigenen Wissensgebiet, nämlich der Theorie der endlichen Automaten, behandelt werden.
Programmierbare Steuerungen
Computer sind universelle Geräte der Informationsverarbeitung, die sich hervorragend als Steuergerät eignen. Man findet sie je nach Aufgabe als Controller, als speicherprogrammierbare Steuerung (SPS) oder als Industrie-PC (IPC). Während der SPS-Programmierer Logik- und Kontaktpläne oder die Anweisungsliste eingeben kann, werden Controller und IPC mit höheren Programmiersprachen programmiert. IPCs können mit geringstem Aufwand umfangreiche Zusatzfunktionen wie Visualisierungen, Protokollierungen und Statistiken bereitstellen.
Ausgeführte Programme benötigen Zeit. Nur Hard- und Software, die auch im ungünstigsten Fall synchron zum Prozess arbeiten kann, ist als Steuergerät geeignet und wird als echtzeitfähig bezeichnet. Im engeren Sinn bedeutet Echtzeit jedoch, dass Hard- und Software eines Rechners für diesen Zweck besonders ausgelegt sind. Rechner, die steuern, dürfen nie überlastet sein.
Anwendungen und Beispiele
Beispiele für gesteuerte technologische Prozesse:
- Steuerung (Dampfmaschine): die mechanische Steuerung der Dampfzufuhr zu den Zylindern.
- Bei einer Waschmaschine werden Heizung, Wasserzufluss und Elektromotor von einer Steuerung durch Verarbeitung von Informationen über Wasserstand, Zeit und Temperatur so in Gang gesetzt und angehalten, dass saubere vorgetrocknete Wäsche entsteht.
- Das Steuergerät eines Automotors beeinflusst kontinuierlich die Kraftstoffzufuhr und den Zündzeitpunkt über analoge Aktoren. Es erhält analoge Informationen über Sensoren für die Gaspedalstellung, die Motortemperatur und die Drehzahl, um den Motor unter verschiedensten äußeren Umständen optimal zu betreiben.
- Sicherheitssteuerung: Der Aufbau ist Redundant und Fehlersicher.
- Fernsteuerung: große Entfernung zwischen Steuerung und Gerät
- Ventilsteuerung: ein Mechanismus zur Steuerung des Gaswechsels bei einem Viertakt-Hubkolbenmotor
- Lenkung: die Beeinflussung der Fahrtrichtung von Fahrzeugen aller Art
- Flugsteuerung: die Steuerung von Luftfahrzeugen
- Raketenstart
- Steuerung der Modelleisenbahn
- Mediensteuerung: Audio- Video- und Lichtsteuerung während einer Show
Geschichte
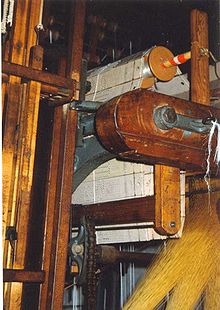 Die Lochkartensteuerung der Jacquard-Webmaschine
Die Lochkartensteuerung der Jacquard-Webmaschine Eine kleine speicherprogrammierbare Steuerung
Eine kleine speicherprogrammierbare SteuerungDer griechische Erfinder Heron von Alexandria (ca. 20–62 n. Chr.) beschreibt in seinem Werk „Automata“ eine Türsteuerung, bei der sich durch Entzünden eines Feuers die Tempeltür öffnet, auch automatische Theater die gesteuert durch sich abwickelnde Seile verschiedene Bewegungen ausführen konnten. Er entwarf auch einen Weihwasserautomat der nach Einwurf einer Münze eine kleine Menge geweihtes Wasser ausgab. Diese Ideen sind aber in Vergessenheit geraten und nicht weiter entwickelt worden.
Zu Beginn des 18. Jahrhunderts wurden Spieldosen mit Stiftwalzen gesteuert. Mitte des 18. Jahrhunderts wurden Webmaschinen von hölzernen Lochkarten gesteuert, die 1805 von Joseph-Marie Jacquard mit einem umlaufenden Lochband wesentlich verbessert wurden.
- 1835 erfindet Joseph Henry das Relais.
- 1941 baut Konrad Zuse den ersten Computer mit Relais.
- 1947 wird der Transistor erfunden.
- 1954 wird die erste Numerische Steuerung mit Röhren produziert.
- 1958 kommt die elektronische Steuerung SIMATIC auf den Markt.
- 1960er: Pneumatische Steuerungen sind kleiner und effektiver als Relais-Steuerungen.
- 1970er: Die speicherprogrammierbare Steuerung (SPS) verdrängt pneumatische und Relais-Steuerungen.
- 2000er: Programmierbare Steuerungen werden auch für Sicherheitsfunktionen verwendet.
Siehe auch: Geschichte der Automatisierung, Robotik, NC
Siehe auch
 Portal:Mess-, Steuerungs- und Regelungstechnik – Übersicht zu Wikipedia-Inhalten zum Thema Mess-, Steuerungs- und Regelungstechnik Portal:Elektrotechnik – Übersicht zu Wikipedia-Inhalten zum Thema Elektrotechnik
Portal:Mess-, Steuerungs- und Regelungstechnik – Übersicht zu Wikipedia-Inhalten zum Thema Mess-, Steuerungs- und Regelungstechnik Portal:Elektrotechnik – Übersicht zu Wikipedia-Inhalten zum Thema Elektrotechnik- Steuergerät (Automobilelektronik)
- Kybernetik
- Schaltungs- und Systementwurf in der Mikroelektronik
- Integrierte Navigation bei der Lenkung von Fahrzeugen
Literatur
- A. Lerner: Grundzüge der Kybernetik. 2. Aufl. Berlin 1971.
- N. Wiener: Kybernetik. Düsseldorf/Wien 1968.
Weblinks
 Commons: Regelungs- und Steuerungstechnik (Control engineering) – Sammlung von Bildern, Videos und AudiodateienKategorien:
Commons: Regelungs- und Steuerungstechnik (Control engineering) – Sammlung von Bildern, Videos und AudiodateienKategorien:- Steuerungs- und Regelungstechnik
- Regelungstheorie





Wikimedia Foundation.