- Matrix (Mathematik)
-
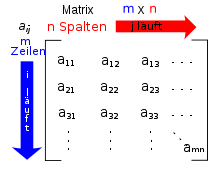 Schema für eine allgemeine m×n-Matrix
Schema für eine allgemeine m×n-Matrix
In der Mathematik versteht man unter einer Matrix (Plural: Matrizen) eine rechteckige Anordnung (Tabelle) von Elementen bzw. mathematischen Objekten, mit denen man in bestimmter Weise rechnen kann (z. B. Matrix-Addition, Matrix-Multiplikation).
Matrizen sind ein Schlüsselkonzept der linearen Algebra und tauchen in fast allen Gebieten der Mathematik auf. Matrizen stellen Zusammenhänge, in denen Linearkombinationen eine Rolle spielen, übersichtlich dar und erleichtern damit Rechen- und Gedankenvorgänge. Sie werden insbesondere dazu benutzt, lineare Abbildungen darzustellen und lineare Gleichungssysteme zu beschreiben.
Die Bezeichnung „Matrix“ wurde 1850 von James Joseph Sylvester eingeführt.
Eine Anordnung, wie in nebenstehender Abbildung, von
 Elementen
Elementen  erfolgt in
erfolgt in  Zeilen und
Zeilen und  Spalten.
Spalten.Inhaltsverzeichnis
Begriffe und erste Eigenschaften
Notation
Als Notation hat sich die Anordnung der Elemente in Zeilen und Spalten zwischen einer großen öffnenden und einer schließenden Klammer durchgesetzt. In der Regel verwendet man runde Klammern, es werden aber auch eckige verwendet. Zum Beispiel bezeichnen
 und
und 
eine Matrix mit zwei Zeilen und drei Spalten. Die Matrix an sich wird durch (manchmal fettgedruckte) Großbuchstaben, vorzugsweise A, bezeichnet. Eine allgemeine Matrix mit m Zeilen und n Spalten könnte so aussehen:
Elemente der Matrix
Die Elemente der Matrix nennt man Einträge oder Komponenten der Matrix. Sie entstammen einer Menge K, in der Regel einem Körper oder einem Ring. Man spricht von einer Matrix über K.
Wählt man für K die Menge der reellen Zahlen, so spricht man von einer reellen Matrix, bei komplexen Zahlen von einer komplexen Matrix.
Ein bestimmtes Element beschreibt man durch zwei Indizes, z. B. ist das Element in der ersten Zeile und der ersten Spalte durch a11 beschrieben. Allgemein bezeichnet aij das Element in der i-ten Zeile und der j-ten Spalte. Deshalb wird die gesamte Matrix manchmal mit (aij) bezeichnet.
Einzelne Zeilen und Spalten werden oft als Spalten- oder Zeilenvektoren bezeichnet. Ein Beispiel:
 , hier sind
, hier sind  und
und  die Spalten bzw. Spaltenvektoren und
die Spalten bzw. Spaltenvektoren und  und
und  die Zeilen bzw. Zeilenvektoren.
die Zeilen bzw. Zeilenvektoren.
Typ
Der Typ einer Matrix ergibt sich aus der Anzahl ihrer Zeilen und Spalten. Eine Matrix mit m Zeilen und n Spalten nennt man eine
 -Matrix (sprich: m mal n oder m Kreuz n Matrix). Die Menge der -Matrizen über K wird mit
-Matrix (sprich: m mal n oder m Kreuz n Matrix). Die Menge der -Matrizen über K wird mit  oder Km,n, manchmal auch mit
oder Km,n, manchmal auch mit  bezeichnet.
bezeichnet.Formale Darstellung
Eine Matrix ist eine doppelt indizierte Familie. Formal ist dies eine Funktion
die jedem Indexpaar (i,j) als Funktionswert den Eintrag ai,j zuordnet. Beispielsweise wird dem Indexpaar (1,2) als Funktionswert der Eintrag a12 zugeordnet. Der Funktionswert ai,j ist also der Eintrag in der i-ten Zeile und der j-ten Spalte. Die Variablen m und n entsprechen der Anzahl der Zeilen bzw. Spalten. Nicht zu verwechseln mit dieser formalen Definition einer Matrix durch Funktionen ist, dass Matrizen selbst lineare Abbildungen beschreiben.
Die Menge
 aller -Matrizen über der Menge K wird in üblicher mathematischer Notation auch
aller -Matrizen über der Menge K wird in üblicher mathematischer Notation auch  geschrieben; hierfür hat sich die Kurznotation eingebürgert (manchmal werden auch die Schreibweisen Km,n,
geschrieben; hierfür hat sich die Kurznotation eingebürgert (manchmal werden auch die Schreibweisen Km,n,  , oder seltener
, oder seltener  benutzt).
benutzt).Stimmen Zeilen- und Spaltenanzahl überein, so spricht man von einer quadratischen Matrix.
Besteht eine Matrix nur aus einer Spalte, so nennt man sie einen Spaltenvektor; besteht sie nur aus einer Zeile, so nennt man sie einen Zeilenvektor. Einen Vektor aus Kn kann man je nach Kontext als einzeilige oder einspaltige Matrix darstellen (also als Element aus
 oder
oder  ).
).Addition und Multiplikation
Auf dem Raum der Matrizen werden elementare Rechenoperationen definiert.
Matrizenaddition
Zwei Matrizen können addiert werden, wenn sie vom selben Typ sind, das heißt, wenn sie dieselbe Anzahl von Zeilen und dieselbe Anzahl von Spalten besitzen. Die Summe zweier
-Matrizen berechnet sich, indem man jeweils die Einträge der beiden Matrizen addiert:Rechenbeispiel:
In der linearen Algebra sind die Einträge der Matrizen üblicherweise Elemente eines Körpers, wie z. B. der reellen oder komplexen Zahlen. In diesem Fall ist die Matrizenaddition assoziativ, kommutativ und besitzt mit der Nullmatrix ein neutrales Element. Im Allgemeinen besitzt die Matrizenaddition diese Eigenschaften jedoch nur, wenn die Einträge Elemente einer algebraischen Struktur sind, die diese Eigenschaften hat.Skalarmultiplikation
Eine Matrix wird mit einem Skalar multipliziert, indem alle Einträge der Matrix mit dem Skalar multipliziert werden:
Rechenbeispiel:
Die Skalarmultiplikation darf nicht mit dem Skalarprodukt verwechselt werden. Um die Skalarmultiplikation durchführen zu dürfen, müssen der Skalar λ und die Einträge der Matrix demselben Ring
 entstammen. Die Menge der -Matrizen ist in diesem Fall ein (Links-)Modul über K.
entstammen. Die Menge der -Matrizen ist in diesem Fall ein (Links-)Modul über K.Matrizenmultiplikation
Zwei Matrizen können multipliziert werden, wenn die Spaltenanzahl der linken mit der Zeilenanzahl der rechten Matrix übereinstimmt. Das Produkt einer
 -Matrix
-Matrix  und einer -Matrix
und einer -Matrix  ist eine
ist eine  -Matrix
-Matrix  , deren Einträge berechnet werden, indem die Produktsummenformel, ähnlich dem Skalarprodukt, auf Paare aus einem Zeilenvektor der ersten und einem Spaltenvektor der zweiten Matrix angewandt wird:
, deren Einträge berechnet werden, indem die Produktsummenformel, ähnlich dem Skalarprodukt, auf Paare aus einem Zeilenvektor der ersten und einem Spaltenvektor der zweiten Matrix angewandt wird:Rechenbeispiel:
Bei der Berechnung von Hand bietet das falksche Schema eine Hilfestellung. Bei der Berechnung mit dem Computer kann sich bei großen Matrizen der Einsatz des Strassen-Algorithmus lohnen.
Die Matrizenmultiplikation ist im Allgemeinen nicht kommutativ, d. h. im Allgemeinen gilt
 , sofern überhaupt beide Seiten definiert sind, was bedeutet, dass l = n gilt. Ist diese Bedingung erfüllt, dann sind die Produkte auf beiden Seiten der Gleichung quadratische Matrizen; diese sind aber nur vergleichbar, wenn sie "gleich groß" sind, d.h., gleich viele Zeilen und Spalten haben, also auch m = n gilt. Auch bei l = m = n sind aber die beiden Produkte im Allgemeinen verschieden.
, sofern überhaupt beide Seiten definiert sind, was bedeutet, dass l = n gilt. Ist diese Bedingung erfüllt, dann sind die Produkte auf beiden Seiten der Gleichung quadratische Matrizen; diese sind aber nur vergleichbar, wenn sie "gleich groß" sind, d.h., gleich viele Zeilen und Spalten haben, also auch m = n gilt. Auch bei l = m = n sind aber die beiden Produkte im Allgemeinen verschieden.Die Matrizenmultiplikation ist assoziativ:
Die Matrizenaddition und Matrizenmultiplikation genügen zudem den beiden Distributivgesetzen:
für alle
-Matrizen A,B und -Matrizen C sowiefür alle
-Matrizen A und -Matrizen B,C.Eine besondere Rolle bezüglich der Matrizenmultiplikation spielen die quadratischen Matrizen über einem Ring R, also
 . Diese bilden selbst mit der Matrizenaddition und -multiplikation wiederum einen Ring. Ist der Ring R unitär mit dem Eins-Element 1, dann ist die Einheitsmatrix
. Diese bilden selbst mit der Matrizenaddition und -multiplikation wiederum einen Ring. Ist der Ring R unitär mit dem Eins-Element 1, dann ist die Einheitsmatrixdas Eins-Element des Matrizenrings, d. h. dieser ist auch unitär. Allerdings ist der Matrizenring
 für n > 1 niemals kommutativ.
für n > 1 niemals kommutativ.Zerlegt man Matrizen in Blockmatrizen, so können diese komponentenweise ausmultipliziert werden:
Hierbei ist E2 die
 -Einheitsmatrix. Mit 0 ist die jeweils passende Matrix gemeint, deren Komponenten alle 0 sind.
-Einheitsmatrix. Mit 0 ist die jeweils passende Matrix gemeint, deren Komponenten alle 0 sind.Da die Matrix-Multiplikation assoziativ ist, kann eine Kette von Matrix-Multiplikationen unterschiedlich geklammert werden. Das Problem eine Klammerung zu finden, die zu einer Berechnung mit der minimalen Anzahl von elementaren arithmetischen Operationen führt, ist ein Optimierungsproblem.
Potenzieren von Matrizen
Quadratische Matrizen
 können mit sich selbst multipliziert werden, analog zur Potenz bei den reellen Zahlen führt man abkürzend die Matrixpotenz
können mit sich selbst multipliziert werden, analog zur Potenz bei den reellen Zahlen führt man abkürzend die Matrixpotenz  oder
oder  etc. ein. Damit ist es auch sinnvoll, quadratische Matrizen als Elemente in Polynomen einzusetzen. Zu weitergehenden Ausführungen hierzu siehe unter charakteristisches Polynom. Zur einfacheren Berechnung kann hier die jordansche Normalform verwendet werden.
etc. ein. Damit ist es auch sinnvoll, quadratische Matrizen als Elemente in Polynomen einzusetzen. Zu weitergehenden Ausführungen hierzu siehe unter charakteristisches Polynom. Zur einfacheren Berechnung kann hier die jordansche Normalform verwendet werden.Quadratische Matrizen über
 oder
oder  kann man darüber hinaus sogar in Potenzreihen einsetzen, vgl. Matrixexponential.
kann man darüber hinaus sogar in Potenzreihen einsetzen, vgl. Matrixexponential.Weitere Rechenoperationen
Die transponierte Matrix
Die Transponierte der Matrix
 vom Format ist die Matrix
vom Format ist die Matrix  vom Format
vom Format  , das heißt zu
, das heißt zuist die Transponierte
Man schreibt also die erste Zeile als erste Spalte und die zweite Zeile als zweite Spalte usw.
Die Matrix wird sozusagen an ihrer Hauptdiagonale
 gespiegelt.
gespiegelt.Beispiel:
Es gelten die folgenden Rechenregeln:
Die transponierte Matrix wird gelegentlich auch gestürzte Matrix genannt.
Bei Matrizen über
ist die adjungierte Matrix genau die transponierte Matrix.Inverse Matrix
Für manche quadratische Matrizen A gibt es eine Matrix A − 1, für die
- AA − 1 = A − 1A = E
gilt, wobei E die Einheitsmatrix ist. A − 1 heißt inverse Matrix von A. Matrizen, die eine inverse Matrix besitzen, bezeichnet man als invertierbare oder reguläre Matrizen. Umgekehrt werden nicht-invertierbare Matrizen als singuläre Matrizen bezeichnet.
Vektor-Vektor-Produkte (Skalarprodukt und Tensorprodukt)
Seien v und w zwei Spaltenvektoren der Länge n, so ist das Matrixprodukt
 nicht definiert. Die beiden Produkte
nicht definiert. Die beiden Produkte  und
und  existieren jedoch.
existieren jedoch.Das erste Produkt ist eine
 -Matrix, die als Zahl interpretiert wird; sie wird das kanonische Skalarprodukt von v und w genannt und mit
-Matrix, die als Zahl interpretiert wird; sie wird das kanonische Skalarprodukt von v und w genannt und mit  bzw.
bzw.  bezeichnet:
bezeichnet:Das zweite Produkt ist eine
 -Matrix vom Rang 1 und heißt Dyadisches Produkt oder Tensorprodukt von v und w (geschrieben
-Matrix vom Rang 1 und heißt Dyadisches Produkt oder Tensorprodukt von v und w (geschrieben  ):
):Vektorräume von Matrizen
Die
-Matrizen über einem kommutativen Ring R mit 1 bilden mit der Matrizenaddition und der Skalarmultiplikation jeweils einen R-Modul. Die Spur des Matrixprodukts 
ist dann ein Skalarprodukt auf dem Matrizenraum.
Im Spezialfall
 handelt es sich bei diesem Matrizenraum um einen euklidischen Vektorraum. In diesem Raum stehen die symmetrischen Matrizen und die schiefsymmetrischen Matrizen senkrecht aufeinander. Ist A eine symmetrische und B eine schiefsymmetrische Matrix, so gilt
handelt es sich bei diesem Matrizenraum um einen euklidischen Vektorraum. In diesem Raum stehen die symmetrischen Matrizen und die schiefsymmetrischen Matrizen senkrecht aufeinander. Ist A eine symmetrische und B eine schiefsymmetrische Matrix, so gilt  .
.Im Spezialfall
 ist die Spur des Matrixproduktes
ist die Spur des Matrixproduktes 
ein Skalarprodukt, das Hilbert-Schmidt-Skalarprodukt und der Matrizenraum wird zu einem unitären Vektorraum.
Die Einheitsmatrix ist eine spezielle quadratische Matrix, die auf der Hauptdiagonalen nur 1 und sonst nur 0 als Einträge besitzt. Im Matrizenring repräsentiert sie das Einselement. Analog fungiert die Nullmatrix als Nullelement.
Anwendungen
Zusammenhang mit linearen Abbildungen
Das Besondere an Matrizen über einem Ring K ist der Zusammenhang zu linearen Abbildungen. Zu jeder Matrix
 lässt sich eine lineare Abbildung mit Definitionsbereich Kn (Menge der Spaltenvektoren) und Wertebereich Km definieren, indem man jeden Spaltenvektor
lässt sich eine lineare Abbildung mit Definitionsbereich Kn (Menge der Spaltenvektoren) und Wertebereich Km definieren, indem man jeden Spaltenvektor  auf
auf  abbildet; und jede lineare Abbildung mit diesem Definitions- und Wertebereich entspricht auf diese Weise genau einer -Matrix. Diesen Zusammenhang bezeichnet man auch als (kanonischen) Isomorphismus
abbildet; und jede lineare Abbildung mit diesem Definitions- und Wertebereich entspricht auf diese Weise genau einer -Matrix. Diesen Zusammenhang bezeichnet man auch als (kanonischen) IsomorphismusEr stellt bei vorgegebenem K, m, n eine Bijektion zwischen der Menge der Matrizen und der Menge der linearen Abbildungen dar. Das Matrixprodukt geht hierbei über in die Komposition (Hintereinanderausführung) linearer Abbildungen. Weil die Klammerung bei der Hintereinanderausführung dreier linearer Abbildungen keine Rolle spielt, gilt dies dann auch für die Matrixmultiplikation, sie ist also assoziativ.
Ist K sogar ein Körper, kann man statt der Spaltenvektorräume beliebige endlichdimensionale K-Vektorräume V und W (der Dimension n bzw. m) betrachten. (Falls K ein kommutativer Ring mit 1 ist, dann kann man analog freie K-Moduln betrachten.) Diese sind nach Wahl von Basen
 von V und
von V und  von W zu Kn bzw. Km isomorph, weil zu einem beliebigen Vektor
von W zu Kn bzw. Km isomorph, weil zu einem beliebigen Vektor  eine eindeutige Zerlegung in Basisvektoren
eine eindeutige Zerlegung in Basisvektorenexistiert und die darin vorkommenden Körperelemente αj den Koordinatenvektor
bilden. Jedoch hängt der Koordinatenvektor von der verwendeten Basis v ab, die daher auch in der Bezeichnung vu vorkommt.
Analog verhält es sich im Vektorraum W. Ist eine lineare Abbildung
 gegeben, so lassen sich die Bilder der Basisvektoren von V eindeutig in die Basisvektoren von W zerlegen in der Form
gegeben, so lassen sich die Bilder der Basisvektoren von V eindeutig in die Basisvektoren von W zerlegen in der Formmit Koordinatenvektor
Die Abbildung ist dann vollständig festgelegt durch die sog. Abbildungsmatrix
denn für das Bild des o.g. Vektors u gilt
also
 („Koordinatenvektor = Matrix mal Koordinatenvektor“). (Die Matrix wfv hängt von den verwendeten Basen v und w ab; bei der Multiplikation wird die Basis v, die links und rechts vom Malpunkt steht, „weggekürzt“, und die „außen“ stehende Basis w bleibt übrig.)
(„Koordinatenvektor = Matrix mal Koordinatenvektor“). (Die Matrix wfv hängt von den verwendeten Basen v und w ab; bei der Multiplikation wird die Basis v, die links und rechts vom Malpunkt steht, „weggekürzt“, und die „außen“ stehende Basis w bleibt übrig.)Die Hintereinanderausführung zweier linearer Abbildungen
und  (mit Basen v, w bzw. x) entspricht dabei der Matrixmultiplikation, also
(mit Basen v, w bzw. x) entspricht dabei der Matrixmultiplikation, also(auch hier wird die Basis w „weggekürzt“).
Somit ist die Menge der linearen Abbildungen von V nach W wieder isomorph zu
. Der Isomorphismus  hängt aber von den gewählten Basen v und w ab und ist daher nicht kanonisch: Bei Wahl einer anderen Basis v' für V bzw. w' für W wird derselben linearen Abbildung nämlich eine andere Matrix zugeordnet, die aus der alten durch Multiplikation von rechts bzw. links mit einer nur von den beteiligten Basen abhängigen invertierbaren
hängt aber von den gewählten Basen v und w ab und ist daher nicht kanonisch: Bei Wahl einer anderen Basis v' für V bzw. w' für W wird derselben linearen Abbildung nämlich eine andere Matrix zugeordnet, die aus der alten durch Multiplikation von rechts bzw. links mit einer nur von den beteiligten Basen abhängigen invertierbaren  - bzw. -Matrix (sog. Basiswechselmatrix) entsteht. Das folgt durch zweimalige Anwendung der Multiplikationsregel aus dem vorigen Absatz, nämlich
- bzw. -Matrix (sog. Basiswechselmatrix) entsteht. Das folgt durch zweimalige Anwendung der Multiplikationsregel aus dem vorigen Absatz, nämlich(„Matrix = Basiswechselmatrix mal Matrix mal Basiswechselmatrix“). Dabei bilden die Identitätsabbildungen eV und eW jeden Vektor aus V bzw. W auf sich selbst ab.
Bleibt eine Eigenschaft von Matrizen unberührt von solchen Basiswechseln, so ist es sinnvoll, diese Eigenschaft auch basisunabhängig der entsprechenden linearen Abbildung zuzusprechen.
Im Zusammenhang mit Matrizen oft auftretende Begriffe sind der Rang und die Determinante einer Matrix. Der Rang ist (falls K ein Körper ist) im angeführten Sinne basisunabhängig, und man kann somit vom Rang auch bei linearen Abbildungen sprechen. Die Determinante ist nur für quadratische Matrizen definiert, die dem Fall V = W entsprechen; sie bleibt unverändert, wenn derselbe Basiswechsel im Definitions- und Wertebereich durchgeführt wird, wobei beide Basiswechselmatrizen zueinander invers sind:
In diesem Sinne ist also auch die Determinante basisunabhängig.
Umformen von Matrizengleichungen
Speziell in den multivariaten Verfahren werden häufig Beweisführungen, Herleitungen usw. im Matrizenkalkül durchgeführt.
Gleichungen werden im Prinzip wie algebraische Gleichungen umgeformt, wobei jedoch die Nichtkommutativität der Matrixmultiplikation sowie die Existenz von Nullteilern beachtet werden muss.
Beispiel: Lineares Gleichungssystem als einfache Umformung
Gesucht ist der Lösungsvektor x eines linearen Gleichungssystems
mit A als
-Koeffizientenmatrix. Wenn die inverse Matrix A − 1 existiert, kann man mit ihr von links erweitern:und erhält die Lösung
 .
.
Spezielle Matrizen
Eigenschaften von Endomorphismen
Die folgenden Eigenschaften quadratischer Matrizen entsprechen Eigenschaften von Endomorphismen, die durch sie dargestellt werden.
- Orthogonale Matrizen
- Eine reelle Matrix A ist orthogonal, wenn die zugehörige lineare Abbildung das Standard-Skalarprodukt erhält, das heißt wenn
- gilt. Diese Bedingung ist äquivalent dazu, dass A die Gleichung
- A − 1 = AT
- bzw.
- erfüllt.
- Diese Matrizen stellen Spiegelungen, Drehungen und Drehspiegelungen dar.
- Unitäre Matrizen
- Sie sind das komplexe Gegenstück zu den orthogonalen Matrizen. Eine komplexe Matrix A ist unitär, wenn die zugehörige Transformation die Normierung erhält, das heißt wenn
- gilt. Diese Bedingung ist äquivalent dazu, dass A die Gleichung
- A − 1 = A *
- erfüllt; dabei bezeichnet A * die konjugiert-transponierte Matrix zu A.
- Fasst man den n-dimensionalen komplexen Vektorraum als 2n-dimensionalen reellen Vektorraum auf, so entsprechen die unitären Matrizen genau denjenigen orthogonalen Matrizen, die mit der Multiplikation mit i vertauschen.
- Projektionsmatrizen
- Eine Matrix ist eine Projektionsmatrix, falls
- A = A2
- gilt, sie also idempotent ist, das heißt, die mehrfache Anwendung einer Projektionsmatrix auf einen Vektor lässt das Resultat unverändert. Eine idempotente Matrix hat keinen vollen Rang, es sei denn, sie ist die Einheitsmatrix.
- Beispiel: Es sei X eine
 -Matrix, und damit selbst nicht invertierbar. Dann ist die
-Matrix, und damit selbst nicht invertierbar. Dann ist die  -Matrix
-Matrix
- idempotent. Diese Matrix wird beispielsweise in der Methode der kleinsten Quadrate verwendet.
- Geometrisch entsprechen Projektionsmatrizen der Parallelprojektion entlang des Nullraumes der Matrix.
- Nilpotente Matrizen
- Eine Matrix N heißt nilpotent, falls eine Potenz Nk (und damit auch alle höheren Potenzen) die Nullmatrix ergibt.
Eigenschaften von Bilinearformen
Im folgenden sind Eigenschaften von Matrizen aufgelistet, die Eigenschaften der zugehörigen Bilinearform
entsprechen. Trotzdem können diese Eigenschaften auch für die dargestellten Endomorphismen eine eigenständige Bedeutung besitzen.
- Symmetrische Matrizen
- Eine Matrix A heißt symmetrisch, wenn sie gleich ihrer transponierten Matrix ist:
- AT = A
- Anschaulich gesprochen sind die Einträge symmetrischer Matrizen symmetrisch zur Hauptdiagonalen.
- Beispiel:
- Symmetrische Matrizen entsprechen einerseits symmetrischen Bilinearformen:
- vTAw = wTAv,
- andererseits den selbstadjungierten linearen Abbildungen:
- Hermitesche Matrizen
- Hermitesche Matrizen sind das komplexe Analogon der symmetrischen Matrizen. Sie entsprechen den hermiteschen Sesquilinearformen und den selbstadjungierten Endomorphismen.
- Eine Matrix
 ist hermitesch oder selbstadjungiert, wenn gilt:
ist hermitesch oder selbstadjungiert, wenn gilt:
- A = A * .
- Schiefsymmetrische Matrizen
- Eine Matrix A heißt schiefsymmetrisch oder auch antisymmetrisch, wenn gilt:
- − AT = A.
- Um diese Bedingung zu erfüllen muss die Hauptdiagonale in allen Stellen null sein; die restlichen Werte werden über die Hauptdiagonale gespiegelt und negiert.
- Beispiel:
- Schiefsymmetrische Matrizen entsprechen antisymmetrischen Bilinearformen:
- und antiselbstadjungierten Endomorphismen:
- Positiv definite Matrizen
- Eine reelle Matrix ist positiv definit, wenn die zugehörige Bilinearform positiv definit ist, das heißt, wenn für alle Vektoren
 gilt:
gilt:
 .
.
- Positiv definite Matrizen definieren verallgemeinerte Skalarprodukte. Ist die Bilinearform größer gleich Null, heißt die Matrix positiv semidefinit, analog kann eine Matrix negativ definit beziehungsweise semidefinit heißen, wenn die obige Bilinearform immer kleiner beziehungsweise kleiner gleich Null ist. Matrizen, die keine dieser Eigenschaften erfüllen, heißen indefinit.
Weitere Konstruktionen
- Konjugierte und Adjungierte Matrix
Enthält eine Matrix komplexe Zahlen, erhält man die konjugierte Matrix, indem man ihre Komponenten durch die konjugiert komplexen Elemente ersetzt. Die adjungierte Matrix (auch hermitesch konjugierte Matrix) einer Matrix A wird mit A * bezeichnet und entspricht der transponierten Matrix, bei der zusätzlich alle Elemente komplex konjugiert werden.
- Adjunkte oder Komplementäre Matrix
Die komplementäre Matrix adj(A) einer quadratischen Matrix A setzt sich aus deren Unterdeterminanten zusammen, wobei eine Unterdeterminante auch Minor genannt wird. Für die Ermittlung der Unterdeterminanten det(Aij) werden die i-te Zeile und j-te Spalte von A gestrichen. Aus der resultierenden
 -Matrix wird dann die Determinante det(Aij) berechnet. Die komplementäre Matrix hat dann die Einträge ( − 1)i + jdet(Aji). Diese Matrix wird manchmal auch als Matrix der Kofaktoren bezeichnet.
-Matrix wird dann die Determinante det(Aij) berechnet. Die komplementäre Matrix hat dann die Einträge ( − 1)i + jdet(Aji). Diese Matrix wird manchmal auch als Matrix der Kofaktoren bezeichnet.- Man verwendet die komplementäre Matrix beispielsweise zur Berechnung der Inversen einer Matrix A, denn nach dem Laplaceschen Entwicklungssatz gilt
 .
.
- Damit ist die Inverse
 , wenn
, wenn  .
.
Verallgemeinerungen
Man könnte auch Matrizen mit unendlich vielen Spalten oder Zeilen betrachten. Diese kann man immer noch addieren. Um sie jedoch „multiplizieren“ (bzw. hintereinander ausführen) zu können, muss man zusätzliche Bedingungen an ihre Komponenten stellen (da die auftretenden Summen (unendliche) Reihen sind und nicht konvergieren müssen). Die genaueren Betrachtungen solcher Fragestellungen führten zur Entstehung der Funktionalanalysis, die diese Begriffe behandelt.
Einen speziellen Fall bilden Vektoren im Hilbertraum. Es sei
 (mit
(mit  ) eine Orthonormalbasis mit den gerade angedeuteten Einschränkungen. Dann erhält man eine Matrixdarstellung eines linearen Operators
) eine Orthonormalbasis mit den gerade angedeuteten Einschränkungen. Dann erhält man eine Matrixdarstellung eines linearen Operators  , wenn man die Matrixelemente
, wenn man die Matrixelemente  definiert; dabei ist
definiert; dabei ist  das Skalarprodukt im betrachteten Hilbertraum, und der Operator ist lediglich eine lineare Abbildung einer dichten Teilmenge
das Skalarprodukt im betrachteten Hilbertraum, und der Operator ist lediglich eine lineare Abbildung einer dichten Teilmenge  dieses Raumes, also
dieses Raumes, also  .
.Man erhält so eine „Matrixdarstellung“ des betrachteten Operators.
Das System der Eigenwerte dieser Matrix, in einer endlichdimensionalen Approximation, umfasst approximativ auch eventuelle kontinuierliche Anteile des Spektrums dieser Operatoren (z. B. Orts- oder Impulsoperator), ähnlich wie ein Integral durch endliche Summen approximiert werden kann.
Literatur
- Gerd Fischer: Lineare Algebra. Vieweg-Verlag, ISBN 3-528-97217-3.
- Karsten Schmidt, Götz Trenkler: Einführung in die Moderne Matrix-Algebra: Mit Anwendungen in der Statistik. Springer, ISBN 978-3-540-33007-3.
- Gilbert Strang: Lineare Algebra. 1. Auflage. Springer-Verlag, Berlin 2003, ISBN 978-3-540-43949-3.
Weblinks
 Wiktionary: Matrix – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen
Wiktionary: Matrix – Bedeutungserklärungen, Wortherkunft, Synonyme, Übersetzungen Commons: Matrix – Sammlung von Bildern, Videos und Audiodateien
Commons: Matrix – Sammlung von Bildern, Videos und Audiodateien- The Matrix Cookbook – Eine englischsprachige, umfangreiche Matrix-Formelsammlung (PDF; 522 kB)











































Wikimedia Foundation.