- Global Positioning System
-
 NAVSTAR-Satellit der zweiten Generation
NAVSTAR-Satellit der zweiten Generation
 Bewegung der Satelliten über der Erde
Bewegung der Satelliten über der ErdeGlobal Positioning System (GPS), offiziell NAVSTAR GPS, ist ein globales Navigationssatellitensystem zur Positionsbestimmung und Zeitmessung. Es wurde seit den 1970er-Jahren vom US-Verteidigungsministerium entwickelt und löste ab etwa 1985 das alte Satellitennavigationssystem NNSS (Transit) der US-Marine ab, ebenso die Vela-Satelliten zur Ortung von Atombombenexplosionen. GPS ist seit Mitte der 1990er-Jahre voll funktionsfähig und stellt seit der Abschaltung der künstlichen Signalverschlechterung (Selective Availability) am 2. Mai 2000 auch für zivile Zwecke eine Ortungsgenauigkeit in der Größenordnung von oft besser als 10 Meter sicher. Die Genauigkeit lässt sich durch Differenzmethoden (Differential-GPS / DGPS) in der Umgebung eines Referenzempfängers auf Werte im Zentimeterbereich oder besser steigern. Mit den satellitengestützten Verbesserungssystemen (SBAS), die Korrekturdaten über geostationäre, in den Polargebieten nicht zu empfangende Satelliten verbreiten und ebenfalls zur Klasse der DGPS Systeme gehören, werden kontinentweit Genauigkeiten von einem Meter erreicht. GPS hat sich als das weltweit wichtigste Ortungsverfahren etabliert und wird in Navigationssystemen weitverbreitet genutzt.
Die offizielle Bezeichnung ist „Navigational Satellite Timing and Ranging - Global Positioning System“ (NAVSTAR GPS). NAVSTAR wird manchmal auch als Abkürzung für „Navigation System using Timing and Ranging“ genutzt. GPS wurde am 17. Juli 1995 offiziell in Betrieb genommen.
Einsatzgebiete
GPS war ursprünglich zur Positionsbestimmung und Navigation im militärischen Bereich (in Waffensystemen, Kriegsschiffen, Flugzeugen usw.) vorgesehen. Ein Vorteil ist dabei, dass GPS-Geräte nur Signale empfangen und nicht senden. So kann navigiert werden ohne dass der Feind Informationen über den eigenen Standort erhält. Heute wird es auch im zivilen Bereich genutzt: in der Seefahrt, Luftfahrt, durch Navigationssysteme im Auto, zur Positionsbestimmung und -verfolgung im ÖPNV, zur Orientierung im Outdoor-Bereich, im Vermessungswesen etc. In der Landwirtschaft wird es beim so genannten Precision Farming zur Positionsbestimmung der Maschinen auf dem Acker genutzt. Ebenso wird GPS nun auch im Leistungssport verwendet. Speziell für den Einsatz in Mobiltelefonen wurde das Assisted GPS (A-GPS) entwickelt.
Aufbau und Funktionsweise der Ortungsfunktion
 Stationäre GPS-Empfangsantenne für zeitkritische wissenschaftliche Messungen.
Stationäre GPS-Empfangsantenne für zeitkritische wissenschaftliche Messungen.Das Prinzip der Satellitenortung beschreibt der Artikel Globales Navigationssatellitensystem.
GPS basiert auf Satelliten, die mit kodierten Radiosignalen ständig ihre aktuelle Position und die genaue Uhrzeit ausstrahlen. Aus den Signallaufzeiten können spezielle GPS-Empfänger dann ihre eigene Position und Geschwindigkeit berechnen. Theoretisch reichen dazu die Signale von drei Satelliten aus, welche sich oberhalb ihres Abschaltwinkels befinden müssen, da daraus die genaue Position und Höhe bestimmt werden kann. In der Praxis haben aber GPS-Empfänger keine Uhr, die genau genug ist, um die Laufzeiten korrekt messen zu können. Deshalb wird das Signal eines vierten Satelliten benötigt, mit dem dann auch die genaue Zeit im Empfänger bestimmt werden kann. Zur Mindestanzahl der benötigten Satelliten siehe Artikel GPS-Technik.
Mit den GPS-Signalen lässt sich aber nicht nur die Position, sondern auch die Geschwindigkeit des Empfängers bestimmen. Dieses erfolgt im Allgemeinen über Messung des Dopplereffektes oder die numerische Differenzierung des Ortes nach der Zeit. Die Bewegungsrichtung des Empfängers kann ebenfalls ermittelt werden und als künstlicher Kompass oder zur Ausrichtung von elektronischen Karten dienen. Die Kompass-Funktion beruht ebenfalls auf dem Dopplereffekt. Das bedeutet, dass es bei ruhendem Empfänger nicht möglich ist, eine genaue Kompassmessung durchzuführen. Setzt sich der Empfänger in Bewegung, steht eine Kompassmessung erst nach kurzer Verzögerung zur Verfügung. Neuere Navigationssysteme verwenden hauptsächlich Magnetometer zur Kompassmessung.
Damit ein GPS-Empfänger immer zu mindestens vier Satelliten Kontakt hat, werden insgesamt mindestens 24 Satelliten eingesetzt, die die Erde jeden Sterntag zweimal in einer mittleren Bahnhöhe von 20.200 km umkreisen. Jeweils mindestens vier Satelliten bewegen sich dabei auf jeweils einer der sechs Bahnebenen, die 55° gegen die Äquatorebene inkliniert (geneigt) sind und gegeneinander um jeweils 60° verdreht sind. Ein Satellit ist damit zweimal in 23 Stunden 55 Minuten und 56,6 Sekunden über demselben Punkt der Erde und jeden Tag etwa vier Minuten früher auf dieser Position.
Ein Satellit hat eine erwartete Lebensdauer von 7,5 Jahren, doch funktionieren die Satelliten häufig deutlich länger. Um Ausfälle problemlos zu verkraften, wurden daher bis zu 31 Satelliten in den Orbit gebracht, sodass man auch bei schlechten Bedingungen fünf oder mehr Satelliten verwenden kann. Aktuell benötigt man 60 Tage für das Austauschen eines Satelliten; aus Kostengründen versucht man, diesen Zeitraum auf zehn Tage zu senken und somit die Satellitenanzahl auf 25 zu reduzieren. [1]
Gesendete Daten
Das Datensignal mit einer Datenrate von 50 bit/s und einer Rahmenperiode von 30 s wird parallel mittels Spread Spectrum Verfahren auf zwei Frequenzen ausgesendet:
- Auf der L1-Frequenz (1575,42 MHz) werden der C/A-Code („Coarse/Acquisition“) für die zivile Nutzung, und orthogonal dazu der nicht öffentlich bekannte P/Y-Code („Precision/encrypted“) für die militärische Nutzung eingesetzt. Das übertragene Datensignal ist bei beiden Codefolgen identisch und stellt die 1500 Bit lange Navigationsnachricht dar. Sie enthält alle wichtigen Informationen zum Satelliten, Datum, Identifikationsnummer, Korrekturen, Bahnen, aber auch den Zustand, und benötigt zur Übertragung eine halbe Minute. GPS-Empfänger speichern diese Daten normalerweise zwischen. Zur Initialisierung der Geräte werden des Weiteren auch die so genannten Almanach-Daten übertragen, die die groben Bahndaten aller Satelliten enthalten und zur Übertragung über zwölf Minuten benötigen.
- Die zweite Frequenz L2-Frequenz (1227,60 MHz) überträgt nur den P/Y-Code. Wahlweise kann auf der zweiten Frequenz auch der C/A-Code übertragen werden. Durch die Übertragung auf zwei Frequenzen können ionosphärische Effekte, die zur Erhöhung der Laufzeit führen, herausgerechnet werden, was die Genauigkeit steigert.
- Momentan ist eine dritte L5-Frequenz (1176,45 MHz) im Aufbau. Sie soll die Robustheit des Empfangs weiter verbessern und ist vor allem für die Luftfahrt und Safety-of-Life-Anwendungen vorgesehen. Bei der derzeitigen Geschwindigkeit des Ausbaus ist mit einer Fertigstellung ab 2010 und einem Regelbetrieb ab 2013 zu rechnen.
Der Satellit besitzt einen Empfänger für den Uplink im S-Band (1783,74 MHz up, 2227,5 MHz down).
C/A-Code
Der für die Modulation des Datensignals im zivilen Bereich eingesetzte C/A-Code ist eine so genannte pseudozufällige Codefolge mit einer Länge von 1023 Bits. Die Sendebits einer Codefolge werden bei Spread Spectrum Modulationen als so genannte „Chips“ bezeichnet und tragen keine Nutzdateninformation, sondern dienen nur zur Demodulation mittels Korrelation mit der Codefolge selbst. Diese 1023 Chips lange Folge hat eine Periodenlänge von 1 ms und die Chips-Rate beträgt 1,023 Mcps. Die beiden Codegeneratoren für die Gold-Folge bestehen aus jeweils 10 Bit langen Schieberegistern und sind vergleichbar mit linear rückgekoppelten Schieberegistern, wenngleich sie für sich einzeln nicht die maximale Folge ergeben. Die beim C/A-Code eingesetzten Generatorpolynome G1 und G2 lauten:
- G1 = 1 + x3 + x10
- G2 = 1 + x2 + x3 + x6 + x8 + x9 + x10
Die endgültige Gold-Folge (C/A-Codefolge) wird durch eine Codephasenverschiebung zwischen den beiden Generatoren erreicht. Die Phasenverschiebung wird bei jedem GPS-Satelliten unterschiedlich gewählt, so dass die dabei entstehenden Sendefolgen (Chips-Signalfolgen) orthogonal zueinander stehen – damit ist ein unabhängiger Empfang der einzelnen Satellitensignale möglich, obwohl alle GPS-Satelliten auf den gleichen Nominalfrequenzen L1 und L2 senden (so genanntes Codemultiplex, CDMA-Verfahren).
Im Gegensatz zu den pseudozufälligen Rauschfolgen aus linear rückgekoppelten Schieberegistern (LFSR) haben die zwar ebenfalls pseudozufälligen Rauschfolgen aus Gold-Codegeneratoren wesentlich bessere Eigenschaften der Kreuzkorrelation, wenn man die zugrundeliegenden Generatorpolynome entsprechend auswählt. Dies bedeutet, dass durch die Codephasenverschiebung eingestellten unterschiedlichen Gold-Folgen mit gleichen Generatorpolynomen zueinander fast orthogonal im Coderaum stehen und sich damit kaum gegenseitig beeinflussen. Die beim C/A-Code eingesetzten LFSR-Generatorpolynome G1 und G2 erlauben maximal 1023 Codephasenverschiebungen, wovon ungefähr 25 % zueinander eine in der GPS-Anwendung hinreichend kleine Kreuzkorrelation für den CDMA-Empfang aufweisen. Damit können neben den maximal 32 GPS-Satelliten und deren Navigationssignale weitere rund 200 Satelliten zusätzlich Daten auf der gleichen Sendefrequenz zu den GPS-Empfängern übertragen – dieser Umstand wird beispielsweise im Rahmen von EGNOS zur Übermittlung von atmosphärischen Korrekturdaten, Wetterdaten und Daten für die zivile Luftfahrt ausgenutzt.
Da die Datenrate der damit übertragenen Nutzdaten 50 bit/s beträgt und ein Nutzdatenbit genau 20 ms lang ist, wird ein einzelnes Nutzdatenbit immer durch exakt 20-malige Wiederholung einer Gold-Folge übertragen.
Der zuschaltbare künstliche Fehler Selective Availability, der seit dem Jahr 2000 nicht mehr eingesetzt wird, wurde bei dem C/A-Code dadurch erreicht, dass die zeitliche Ausrichtung (Taktsignal) der Chips einer geringen zeitlichen Schwankung (Jitter) unterworfen wurde. Die regionale Störung von GPS-Signalen wird durch das US-Militär durch Jammer erreicht und macht damit GPS nicht in jedem Fall zu einem verlässlichen Orientierungsmittel, da nicht verlässlich feststellbar ist ob und wie weit GPS-Signale von den tatsächlichen UTM/MGRS-Koordinaten abweichen.
P/Y-Code
 Eine US-Luftwaffensoldatin geht in einem Satellitenkontrollraum der Schriever Air Force Base in Colorado (USA) eine Checkliste zur Steuerung von GPS-Satelliten durch.
Eine US-Luftwaffensoldatin geht in einem Satellitenkontrollraum der Schriever Air Force Base in Colorado (USA) eine Checkliste zur Steuerung von GPS-Satelliten durch.Der längere und meist militärisch verwendete P-Code verwendet als Codegenerator so genannte JPL-Folgen. Er unterteilt sich in den öffentlich dokumentierten P-Code [2] und den zur Verschlüsselung auf der Funkschnittstelle eingesetzten und geheimen Y-Code, welcher bedarfsmäßig zu- bzw. abgeschaltet werden kann. Die Kombination daraus wird als P/Y-Code bezeichnet. Die Verschlüsselung mit dem Y-Code soll einen möglichst manipulationssicheren Betrieb (engl. Anti-Spoofing oder AS-Mode) ermöglichen. Seit 31. Januar 1994 ist der AS-Modus permanent aktiviert und es wird nicht mehr der öffentlich bekannte P-Code direkt übertragen.
Der P-Code wird aus vier linearen Schieberegistern (LFSR) der Länge 10 gebildet. Zwei davon bilden den so genannten X1-Code, die anderen beiden den X2-Code. Der X1-Code wird mit dem X2-Code so über XOR-Verknüpfungen kombiniert, dass insgesamt 37 verschiedene Phasenverschiebungen 27 verschiedene Wochensegmente des P-Codes ergeben. Die Längen sind bei diesem Code wesentlich länger als beim C/A-Code. So liefert der X1-Codegenerator eine Länge 15 345 000 Chips und X2 eine Codefolge, die exakt um 37 Chips länger ist. Die Dauer, bis sich der P-Code wiederholt, ergibt sich daraus zu 266 Tagen (38 Wochen). Der P/Y-Code wird mit einer Chiprate von 10,23 Mcps gesendet, das entspricht der zehnfachen Chiprate des C/A-Codes. Er benötigt daher ein breiteres Frequenzspektrum als der C/A-Code.
Zur Unterscheidung der einzelnen GPS-Satelliten im P/Y-Code wird die sehr lange Codefolge von rund 38 Wochen Dauer in einzelne Wochensegmente aufgeteilt. Jeder GPS-Satellit hat einen genau eine Woche lang dauernden Codeabschnitt zugewiesen, und am Anfang jeder Woche (Sonntag 00:00 Uhr) werden alle P-Codegeneratoren wieder auf den Startwert zurückgesetzt. Damit wiederholt sich pro GPS-Satellit der P/Y-Code einmal pro Woche. Die Bodenstationen benötigen fünf Wochensegmente des in Summe 38 Wochen langen P-Codes für Steueraufgaben, 32 Wochensegmente sind für die Unterscheidung der einzelnen GPS-Satelliten vorgesehen.
Der C/A-Code dient dabei auch zur Umschaltung (so genanntes Hand Over) auf den P/Y-Code. Da die P-Codefolge pro GPS-Satellit eine Woche umfasst, wäre das direkte Synchronisieren einfacher Empfänger auf die P-Codefolge ohne Kenntnis der genauen GPS-Uhrzeit praktisch unmöglich. Einfache GPS-Empfänger, die den P/Y-Code verwenden, synchronisieren sich zuerst auf den C/A-Code, gewinnen aus den übertragenen Daten die notwendige Umschaltinformationen wie Uhrzeit, Wochentag und andere Informationen, stellen damit ihre P-Codegeneratoren entsprechend ein und schalten dann auf den Empfang des P/Y-Code um.
Moderne militärische GPS-Empfänger werden heute mit einer sehr viel größeren Anzahl von Korrelatoren ausgestattet, ähnlich wie der im zivilen Bereich eingesetzte SiRFstar-III-Chipsatz, wodurch es möglich ist, den P/Y-Code direkt auszuwerten. Diese Empfänger werden bei den Herstellern als „direct-Y-code“-Empfänger bezeichnet. Diese Empfängergeneration macht es möglich, den C/A-Code zu stören, um die Nutzung von zivilen GPS-Empfängern durch gegnerische Kräfte beispielsweise zum Vermessen von Feuerstellungen zu verhindern. Da die Bandbreite des militärischen Signals ca. 20 MHz ist, können die 1-2 MHz Bandbreite des C/A-Codes, die zivil genutzt werden, gestört werden, ohne dass militärische Empfänger wesentlich beeinträchtigt werden. Das und die Annahme, dass heutige Konflikte regional begrenzt sind, führten zur Entscheidung, die künstliche Verschlechterung abzuschalten.
Die genauen Parameter für die Y-Verschlüsselung des P-Codes sind nicht öffentlich bekannt. Die Parameter der Navigationsdaten (Nutzdaten, Rahmenaufbau, Bitrate), die mittels P/Y-Code übertragen werden, sind allerdings exakt gleich zu den Daten, die mittels der öffentlich bekannten C/A-Codefolge übertragen werden. Der wesentliche Unterschied besteht darin, dass der Takt der P/Y-Codefolge im Satelliten grundsätzlich keinem künstlichen Taktfehler unterworfen wird und der P-Code auch die 10-fache Taktrate zum C/A-Code aufweist. Damit können P/Y-Empfänger die für die Positionsbestimmung wesentliche Information der Übertragungszeiten genauer gewinnen.
Ausbreitungseigenschaften des Signals
In den verwendeten Frequenzbereichen breitet sich die elektromagnetische Strahlung ähnlich wie sichtbares Licht fast geradlinig aus, wird dabei aber durch Bewölkung oder Niederschlag nur wenig beeinflusst. Dennoch ist auch aufgrund der geringen Sendeleistung der GPS-Satelliten für den besten Empfang der Signale eine direkte Sichtverbindung zum Satelliten erforderlich. In Gebäuden war ein GPS-Empfang bis vor kurzem nicht möglich. Neue Empfängertechnik ermöglicht jedoch nun unter günstigen Bedingungen auch Anwendungen in Gebäuden. Auch zwischen hohen Gebäuden kann es durch mehrfach reflektierte Signale (Mehrwege-Effekt) zu Ungenauigkeiten kommen. Zudem ergeben sich z. T. große Ungenauigkeiten bei ungünstigen Satellitenkonstellationen, zum Beispiel wenn nur drei dicht beieinander stehende Satelliten aus einer Richtung zur Positionsberechnung zur Verfügung stehen. Für eine exakte Positionsermittlung sollten möglichst 4 Satellitensignale aus verschiedenen Himmelsrichtungen empfangbar sein.
Für die zentrale Kontrolle des GPS ist die 50th Space Wing des Air Force Space Command (AFSPC) der US Air Force auf der Schriever AFB, Colorado zuständig.
Die technische Realisierung einschließlich ihrer mathematischen Grundlagen wird im Artikel GPS-Technik beschrieben.
Weitere Aufgaben
Die GPS-Satelliten sind Teil des US-Programms Nuclear Detection System (NDS), früher Integrated Operational Nuclear Detection System (IONDS) genannt, eingebunden in das Verteidigungsprogramm DSP (Defense Support Program). Sie verfügen über Sensoren für Infrarot- und Gammastrahlung (s. a. en:Bhangmeter) und ebenso Detektoren für EMP. Damit sollen sie Atombombenexplosionen und Starts von Interkontinentalraketen mit einer Ortsauflösung von 100 m registrieren.[3] Das GPS hat dabei das Vela-System abgelöst.
Eine weitere Aufgabe des GPS Systems besteht in der Bereitstellung eines einheitlichen Zeitsystems. Die von einem GPS-Empfänger empfangene Zeit ist zunächst die GPS-Zeit. In der Satellitennachricht ist aber auch die Abweichung zwischen GPS-Zeit und Koordinierter Weltzeit (UTC) angegeben. Mit der Genauigkeit der GPS-Zeit und der Angabe der Abweichung garantiert das System eine Abweichung von UTC um maximal eine Mikrosekunde, wenn die Laufzeit auch so genau bestimmt wird.
Geschichte
 Transit-O-Satellit (Operationelle Generation)
Transit-O-Satellit (Operationelle Generation)Die Grundidee, mittels Satelliten ein Navigationssystem aufzubauen, gab es bereits vor dem Zweiten Weltkrieg: Am 11. Mai 1939 meldete der deutsche Ingenieur Karl Hans Janke in Berlin ein Patent für einen „Standortsanzeiger, insbesondere für Luftfahrzeuge“[4] an, welches am 11. November 1943 erteilt wurde. Im Patent geht er von zwei entfernten Körpern (Satelliten) aus, die permanent elektromagnetische Signale senden. Die Signale können empfangen werden und als Vektor auf einem Bildschirm angezeigt werden. Legt man nun eine Karte über den Bildschirm, könne man sogar die Herkunft und Richtung eines Objektes bestimmen.[5]
Neben bodengestützten Funknavigationssystemen wie dem während des Zweiten Weltkriegs entwickelten Decca Navigation System, welches später vor allem der Seeschifffahrtsnavigation diente und prinzipbedingt nur lokal verfügbar war, wurde ab 1958 von der US-Marine das erste Satellitennavigationssystem Transit entwickelt. Zunächst unter der Bezeichnung Navy Navigation Satellite System (NNSS) wurde es ab 1964 militärisch zur Zielführung ballistischer Raketen auf U-Booten und Flugzeugträgern der US-Marine und ab 1967 auch zivil genutzt und ist seit dem 31. Dezember 1996 außer Betrieb. Seine Sendefrequenzen lagen bei 150 und 400 MHz und es erreichte eine Genauigkeit zwischen 500 und 15 m.
 Start eines GPS-Satelliten am 25. September 2005 an Bord einer Delta-II-7925-9.5-Rakete
Start eines GPS-Satelliten am 25. September 2005 an Bord einer Delta-II-7925-9.5-RaketeDas GPS-Programm wurde mit der Gründung des JPO (Joint Program Office) im Jahre 1973 gestartet. Der erste GPS-Satellit wurde 1978[6] vom Vandenberg-Startplatz SLC-3E mit einer Atlas F Rakete in eine Umlaufbahn in 20.200 km Höhe und 63° Bahnneigung geschossen. 1985 startete der letzte Satellit dieser Generation mit einer Atlas E Rakete von der Vandenberg-Startrampe SLC-3W.[7] Mit Einführung der GPS II Serie (1989) wechselte man nach Cape Canaveral und startete von der Startrampe LC-17 mit Delta-6925-Raketen. Die Serien GPS IIA - GPS IIR-M folgten mit Delta-7925-Raketen. Die Inklination wurde bei Starts von Cap Canaveral unter Beibehaltung der Bahnhöhe auf 55° verringert.[8] Im Dezember 1993 wurde die anfängliche Funktionsbereitschaft (Initial Operational Capability) festgestellt. Zu diesem Zeitpunkt waren 24 Satelliten im Einsatz. Die volle Funktionsbereitschaft (Full Operational Capability) wurde im April 1995 erreicht und am 17. Juli 1995 bekanntgegeben. Die GPS IIF-Serie, deren erster Satellit GPS IIF-1 2010 startete) besitzt keinen Feststoff-Apogäumsmotor mehr sondern wird von ihren Delta IV oder Atlas V Trägerraketen direkt im GPS-Orbit ausgesetzt statt auf einer Transferbahn, wie es bis zu GPS IIR-M Serie üblich war.[9]
Um nicht-autorisierte Benutzer (potentielle militärische Gegner) von einer genauen Positionsbestimmung auszuschließen, wurde die Genauigkeit für Benutzer, die nicht über einen Schlüssel verfügen, künstlich verschlechtert (Selective Availability = SA, mit einem Fehler von größer 100 m). SA musste in den Block-II-Satelliten implementiert werden, weil der C/A-Dienst deutlich besser als ursprünglich erwartet war. Es gab aber fast immer vereinzelte Satelliten, bei welchen SA nicht aktiviert war, sodass genaue Zeitübertragungen möglich waren.
Am 2. Mai 2000 wurde diese künstliche Ungenauigkeit der Satelliten abgeschaltet, ab ca. 4:05 Uhr UTC sendeten alle Satelliten ein SA-freies Signal.[10] Seitdem kann das System auch außerhalb des bisherigen exklusiven Anwendungsbereichs zur präzisen Positionsbestimmung genutzt werden. Dies führte unter anderem zum Aufschwung der Navigationssysteme in Fahrzeugen und im Außenbereich, da der Messfehler nun in mindestens 90 % der Messungen geringer als 10 m ist.
Am 25. September 2005 brachte eine Delta-II-Rakete den ersten GPS-Satelliten der Baureihe GPS 2R-M (Modernized) in den Weltraum. Die Antenne wurde verbessert und das Sendespektrum um eine zweite zivile Frequenz und zwei neue militärische Signale erweitert. Seit Dezember 2005 im Einsatz, erweiterte der neue Satellit die Flotte der funktionstüchtigen Satelliten auf 28. Momentan sind 32 Satelliten aktiv (Stand Juni 2008). Am 17. August 2009 startete mit GPS 2R-M8 der letzte GPS Satellit dieser Serie mit einer Delta II-Rakete erfolgreich in seine Transferbahn.
Am 28. Mai 2010 setzte eine Delta IV Medium+ (4,2) den ersten GPS IIF Satelliten im GPS Orbit ab. Diese Serie ist weiter verbessert (u.a. genauere Atomuhren)[11].
Das Pentagon autorisierte die United States Air Force am 9. Mai 2008, die ersten acht Satelliten der dritten Baureihe zu bestellen. Für Entwicklung und Bau wurden 2 Mrd. US-Dollar bereitgestellt. Die dritte Generation wird aus insgesamt 32 Satelliten bestehen und soll ab 2014 das GPS-II-System ersetzen. Sie unterscheiden sich durch eine erhöhte Signalstärke und weitere Maßnahmen, um eine Störung der Signale zu erschweren. Lockheed Martin und Boeing konkurrierten um den Auftrag, mit dem automatisch auch die nachfolgenden 24 Satelliten verbunden sein sollte.[12] Am 15. Mai 2008 gewann Lockheed-Martin den Auftrag zum Bau der ersten zwei GPS IIIA Satelliten.[13] Inzwischen soll der Auftrag auf acht Satelliten aufgestockt worden sein.[14]
Satelliten
 Skaladiagramm, Erde und GPS-Satellitenbahn (grüne Linie)
Skaladiagramm, Erde und GPS-Satellitenbahn (grüne Linie)Die GPS-Satelliten sind auf mehrere Arten nummeriert:
- Fortlaufende Navstar-Nummer des Satelliten: Unter dieser Bezeichnung wird der Satellit in internationalen Registern geführt.
- USA-Nummer: damit werden seit 1984 US-Militärsatelliten nummeriert.
- fortlaufende SVN-Nummer (space vehicle number) für GPS-Satelliten.
- PRN-Nummer, welche die Signalkodierung (nicht den Satelliten) bezeichnet und auf dem GPS-Empfänger angezeigt wird. Wenn ein Satellit ausfällt, kann ein anderer sein Signal mit dem PRN-Code aussenden.
Aktuelle Konstellation
GPS-Konstellation 22. Februar 2010 Satellit Position Start SVN PRN Katalog-Nr.
(AFSC)internat. Bezeichnung
(COSPAR)Typ NAVSTAR 22 (USA 66) E5 26.11.1990 23 32 20959 1990-103A IIA NAVSTAR 23 (USA 71) D5 04.07.1991 24 24 21552 1991-047A IIA NAVSTAR 26 (USA 83) F5 07.07.1992 26 26 22014 1992-039A IIA NAVSTAR 27 (USA 84) A4 09.09.1992 27 27 22108 1992-058A IIA NAVSTAR 33 (USA 92) A1 26.06.1993 39 9 22700 1993-042A IIA NAVSTAR 35 (USA 96) D4 26.10.1993 34 4 22877 1993-068A IIA NAVSTAR 36 (USA 100) C1 10.03.1994 36 6 23027 1994-016A IIA NAVSTAR 37 (USA 117) C2 28.03.1996 33 3 23833 1996-019A IIA NAVSTAR 38 (USA 126) E3 16.07.1996 40 10 23953 1996-041A IIA NAVSTAR 39 (USA 128) B2 12.09.1996 30 30 24320 1996-056A IIA NAVSTAR 43 (USA 132) F3 23.07.1997 43 13 24876 1997-035A IIR NAVSTAR 44 (USA 134) A3 06.11.1997 38 8 25030 1997-067A IIA NAVSTAR 46 (USA 145) D2 07.10.1999 46 11 25933 1999-055A IIR NAVSTAR 47 (USA 150) E1 11.05.2000 51 20 26360 2000-025A IIR NAVSTAR 48 (USA 151) B3 16.07.2000 44 28 26407 2000-040A IIR NAVSTAR 49 (USA 154) F1 10.11.2000 41 14 26605 2000-071A IIR NAVSTAR 50 (USA 156) E4 30.01.2001 54 18 26690 2001-004A IIR NAVSTAR 51 (USA 166) B1 29.01.2003 56 16 27663 2003-005A IIR NAVSTAR 52 (USA 168) D3 31.03.2003 45 21 27704 2003-010A IIR NAVSTAR 53 (USA 175) E2 21.12.2003 47 22 28129 2003-058A IIR NAVSTAR 54 (USA 177) C3 20.03.2004 59 19 28190 2004-009A IIR NAVSTAR 55 (USA 178) F4 23.06.2004 60 23 28361 2004-023A IIR NAVSTAR 56 (USA 180) D1 06.11.2004 61 2 28474 2004-045A IIR NAVSTAR 57 (USA 183) C4 26.09.2005 53 17 28874 2005-038A IIR-M NAVSTAR 58 (USA 190) A2 25.09.2006 52 31 29486 2006-042A IIR-M NAVSTAR 59 (USA 192) B4 17.11.2006 58 12 29601 2006-052A IIR-M NAVSTAR 60 (USA 196) F2 17.10.2007 55 15 32260 2007-047A IIR-M NAVSTAR 61 (USA 199) C6 20.12.2007 57 29 32384 2007-062A IIR-M NAVSTAR 62 (USA 201) A6 15.03.2008 48 7 32711 2008-012A IIR-M NAVSTAR 63 (USA 203) B2 24.03.2009 49 1 34661 2009-014A IIR-M NAVSTAR 64 (USA 206) E6 17.08.2009 50 5 35752 2009-043A IIR-M NAVSTAR 65 (USA 213) B2 28.05.2010 62 25 36585 2010-022A IIF PRN 1 (SVN 49) ist momentan aufgrund eines Hardwaredefekts permanent auf Unhealthy gesetzt. [15]
Übersicht über die GPS-Satellitenmodelle
GPS I
- Von dieser Baureihe ist kein Satellit mehr aktiv.
- Hersteller: Rockwell
- Umlaufbahnen: kreisförmig in 20.200 km Höhe mit 63° Inklination.[7]
GPS II/IIA
- Hersteller: Rockwell
- Umlaufbahnen: kreisförmig in 20.200 km Höhe mit 55° Inklination.[8]
GPS IIR
- Masse: 2032 kg
- Dimensionen: 152 × 193 × 191 cm
- Elektrische Leistung: 1,136 kW
- Geschätzte Lebensdauer: Konstruiert für 6 bis 7,5 Jahre, durchschnittliche tatsächliche Einsatzdauer: 10 Jahre, längste Einsatzzeit: 16 Jahre.
- Transponder: 2× L-Band, 1× S-Band
- Kosten: 40 Mio. US-Dollar
- Hersteller: Lockheed Martin
- Nutzlast: 2 Cs-Atomuhren, 2 Rb-Atomuhren
- Verbreitung: 21 hergestellt, 13 gestartet, 12 sind im Einsatz, die restlichen 8 wurden zu GPS IIR-M umgerüstet.
- Basiert auf: Lockheed-Martins AS 4000 Satellitenbus
- Umlaufbahnen: kreisförmig in 20.200 km Höhe mit 55° Inklination.[16]
GPS IIR-M
- Start von Navstar 57 (andere Bezeichnungen: USA 183, GPS IIR-M1, GPS IIR-14M): 25. Sept. 2005
- Letzter Start: 17. August 2009[17]
- Masse: 2060 kg
- Geschätzte Lebensdauer: 13 Jahre
- Kosten: 60 Mio. Euro
- Hersteller: Lockheed Martin
- Verbreitung: 8 aus GPS IIR umgerüstet, alle 8 gestartet
- Signal: L2C (zweites ziviles Signal auf L2); L2M (weiteres militärisches Signal, ab 2008). Voraussichtlich L5-Testsignal ab 2008
- Nutzlast: 3 Rb-Atomuhren; Sendeleistung regelbar.
- Basiert auf: Lockheed-Martins AS 4000 Satellitenbus
- Umlaufbahnen: kreisförmig in 20.200 km Höhe mit 55° Inklination.[18]
GPS IIF
- Start: erster Start zunächst für 2002 geplant, dann 2007, über 2009, schließlich am 28. Mai 2010.
- Signal: L5 (drittes ziviles Signal)
- Kosten: 121 Mio. US-Dollar[19]
- Nutzlast: 2 Cs-Atomuhren, 1 Rb-Atomuhr;
- Hersteller: Boeing
- Verbreitung: 12
- Umlaufbahnen: kreisförmig in 20.200 km Höhe mit 55° Inklination.[9]
GPS III
- Start geplant für 2014, die ersten acht Satelliten GPS IIIA wurden 2008 autorisiert.[20] Die Indienststellung war ursprünglich für 2012 geplant, hat sich aber verzögert.[12]
- Basiert auf: Lockheed-Martins: A2100A Satellitenbus [9]
- Umlaufbahnen: kreisförmig in 20.200 km Höhe mit 55° Inklination.[14]
Genauigkeit der Positionsbestimmung
Kategorisierung
Es gibt zwei Dienstklassen:
- Standard Positioning Service (SPS) ist für jedermann verfügbar und erreicht eine Genauigkeit (engl. accuracy) von ca. 15 m horizontal (in 95 % der Messungen). Nach stetigen Verbesserungen vor allem durch den sukzessiven Ersatz älterer Satelliten durch Nachfolgemodelle wird aktuell eine Genauigkeit von 7,8 m garantiert (in 95 % der Messungen) bzw. 4 m RMS. Diese Genauigkeit gilt jedoch nur für das abgestrahlte Signal im Raum und beschreibt keinen 2D oder 3D Fehler. Dazu kommen noch die Empfänger- und Umgebungsfehler wie Empfängerrauschen, Troposphärenfehler, Softwarefehler, Mehrwegesignale usw.
Im Mai 2000 wurde eine künstliche Ungenauigkeit vom US-Militär abgeschaltet; davor betrug die Genauigkeit 100 m. Mit der vierten Ausbaustufe soll in Krisen- bzw. Kriegsgebieten eine künstliche Verschlechterung (Selective Availability) durch lokale Störung des Empfangs verwirklicht werden. - Precise Positioning Service (PPS) ist der militärischen Nutzung vorbehalten und auf eine 2D-Positionsgenauigkeit von 21 m (in 95 % der Messungen) bzw. 11 m RMS ausgelegt. Diese Signale werden verschlüsselt ausgestrahlt.
Eine Erhöhung der Genauigkeit (0,01–5 m) kann durch Einsatz von DGPS (Differential-GPS) erreicht werden.
Zur Verbesserung der Genauigkeit dienen satellitengestützte Erweiterungssysteme (Satellite-Based Augmentation Systems, SBAS): EGNOS in Europa, WAAS in den USA, MSAS in Japan und GAGAN in Indien.
GPS nutzt eine eigene kontinuierliche Atomzeitskala, welche keine Schaltsekunden berücksichtigt. Seit Einführung von GPS im Jahr 1980 hat sich deshalb die Differenz zwischen der GPS-Zeit und der UTC aktuell (2009) auf 15 Sekunden aufsummiert (UTC-Zeit + 15 Sekunden = GPS-Zeit). Der aktuelle Wert dieser Differenz wird im Nutzdatensignal des Systems übertragen.
Es gibt die folgenden zwei Verfahren, um mittels GPS eine Position zu bestimmen:
- Code: Dieses Verfahren ermöglicht eine recht robuste Positionsbestimmung mit einer Genauigkeit von weniger als 10 m. Alle preiswerten Empfänger verwenden dieses Verfahren. Mittels DGPS sind Genauigkeiten unter einem Meter möglich.
- Code + Trägerphase: Unter guten Empfangsbedingungen und mit präzisen Empfängern ist mit diesem Verfahren eine Genauigkeit von unter 5 m möglich. Die Genauigkeitssteigerung rührt aber nicht nur vom geringeren Rauschen der Trägerphasenmessung her, sondern auch von der Verwendung der zweiten Frequenz zur Ionosphärenmessung. Soll der Millimeter-Bereich erreicht werden, so ist dies bisher nur im DGPS-Betrieb möglich, weil auch die lokalen Effekte der Troposphäre berücksichtigt werden müssen.
In Fahrzeugen können zusätzlich Odometrie-Daten wie Geschwindigkeit und Beschleunigung sowie Richtungsdaten (z. B. Differential-Odometer, Drehratensensor) verwertet werden, um die Position präziser zu bestimmen oder auch noch in Funklöchern wie z. B. Tunneln eine Position ermitteln zu können. Da diese Daten nur von den in der Fahrzeugelektronik implementierten Sensoren gemessen und an das Navigationssystem übermittelt werden können, ist diese höhere Präzision derzeit nur von festeingebauten Navigationssystemen zu erreichen.
Relativistische Effekte
Die Zeit, die die Atomuhren auf den GPS-Satelliten anzeigen, unterliegt den Effekten der relativistischen Zeitdilatation.[21] Dabei hängt nach der allgemeinen Relativitätstheorie die Ganggeschwindigkeit einer Uhr vom Ort im Gravitationsfeld ab und nach der speziellen auch von ihrer Geschwindigkeit. Das geringere Gravitationspotential in der Satellitenbahn lässt die Zeit schneller vergehen, die Bahnbewegung der Satelliten relativ zu einem ruhenden Beobachter auf der Erde verzögert sie. In einer Flughöhe von ca. 3.000 km heben sich beide Effekte gerade auf, in der GPS-Satellitenbahn überwiegt der gravitative Effekt um mehr als das 6-fache. Auf den Satelliten geht damit die Zeit vor. Der relative Gangunterschied (= Δt/t) zu einer irdischen Uhr liegt zwar bei nur 4,4·10−10, er ist jedoch deutlich größer als die relative Ganggenauigkeit von Cäsium-Atomuhren, die besser als 10−13 sind.
Oft wird irrtümlich darauf hingewiesen, dass diese Gangunterschiede zu einem Positionsbestimmungsfehler von mehreren Kilometern pro Tag führten, wenn sie nicht korrigiert würden. Ein solcher Fehler würde aber nur dann auftreten, wenn die Positionsbestimmung über die Ermittlung der Abstände des GPS-Empfängers zu drei Satelliten anhand eines Uhrenvergleichs mit einer Uhr im Empfänger erfolgte. In diesem Fall würde sich bei jeder dieser Abstandsbestimmungen ein Fehler von ca. 12 km pro Tag anhäufen. Gewöhnliche GPS-Empfänger sind aber nicht mit einer Atomuhr ausgestattet. Stattdessen wird die präzise Zeit am Empfangsort auch aus dem C/A-Code der empfangenen Satelliten bestimmt. Aus diesem Grund sind für eine 3D-Positionsbestimmung mindestens vier Satelliten erforderlich (vier Laufzeitsignale zur Bestimmung von vier Parametern, nämlich drei Ortsparametern und der Zeit). Weil alle Satelliten den gleichen relativistischen Effekten ausgesetzt sind, entsteht hierdurch ein vernachlässigbarer Fehler bei der Positionsbestimmung, weil sich dieser Fehler nur über den Laufzeitunterschied auswirkt.
Damit die Satellitensignale des GPS außer zur Positionsbestimmung auch als Zeitstandard verwendet werden können, wird der relativistische Gangunterschied der Uhren allerdings kompensiert. Dazu wird die Schwingungsfrequenz der Satelliten-Uhren auf 10,229999995453 MHz verstimmt, so dass trotz der relativistischen Effekte ein synchroner Gang mit einer irdischen Uhr mit 10,23 MHz gewährleistet ist. Weitere relativistische Effekte, wie zum Beispiel der Sagnac-Effekt sind so klein, dass sie bei stationären Empfängern nicht gesondert berücksichtigt werden müssen.
Differential-GPS
Differential Global Positioning System (DGPS, auch dGPS) ist eine Sammelbezeichnung für Verfahren, die simultan mehrere GPS-Empfänger einsetzen, um die Genauigkeit zu erhöhen. DGPS macht sich das Faktum zunutze, dass die zu einem bestimmten Zeitpunkt wirksamen Fehler des GPS-Systems auf nahegelegenen Messpunkten fast dieselben sind, sodass sie in der Differenz herausfallen.
Man verwendet einen oder mehrere Empfänger, deren Position bestimmt werden soll (Rover), und mindestens einen weiteren Empfänger, der auf einem genau bekannten Vermessungspunkt aufgestellt wird (GPS-Basisstation oder Referenzstation). Auf der Basisstation werden die momentan wirksamen Messfehler des Systems ermittelt, die vor allem auf Uhr- und Bahnfehler der Satelliten und Einflüsse der Ionosphäre entfallen. Mit diesen Informationen (Korrekturdaten) der Basisstation kann ein Rover-Empfänger seine Genauigkeit erhöhen, da er praktisch denselben Messabweichungen unterliegt.
Die erreichbare Genauigkeit hängt vor allem vom Abstand zwischen Rover und Basisstation ab, aber auch von der Satellitenkonstellation.
Offline-Methode (Postprocessing)
Man kann die Messdaten (die empfangenen Satellitensignale) entweder für eine nachträgliche Auswertung aller Messpunkte aufzeichnen (offline) oder die Positionskorrekturen der Basisstation online an alle Rover übermitteln. Erstere Methode wurde vor allem in der Anfangszeit von GPS verwendet, ist aber bis heute für genaue Vermessungsnetze in Gebrauch. Die Berechnung erfolgt durch einen räumlichen Netzausgleich, der entweder auf den Signal-Laufzeiten oder auf ihrer Phasenmessung beruht. Wenn Genauigkeiten im Dezimeter- bis Meterbereich ausreichen, genügt auch die Ausgleichung der von den Empfängern direkt berechneten Positionen.
Für weit ausgedehnte Vermessungsnetze kann es notwendig sein, diese in überlappende Abschnitte zu unterteilen, die sogenannten Sessionen. Mit den vorhandenen Empfängern wird ein Teil der Punkte und ein bis drei Referenzpunkte gleichzeitig eingemessen; mittels letzteren kann das gesamte Netz a posteriori einheitlich ausgeglichen werden. Auch eine nachträgliche „Anfelderung“ einzelner Netzteile ist möglich.
Im ersten GPS-Jahrzehnt, als die Empfänger noch sehr teuer waren, wurden auch Verfahren zur Genauigkeitssteigerung mit nur einem Empfänger entwickelt ("single receiver methods"), u. a. das qGPS (Quasidifferenz-GPS) der TU Wien, das die einzelnen Messpunkte durch wiederholtes Aufsuchen eines zentral gelegenen Bezugspunktes gegeneinander versteift. Die Messungen auf solchen Knotenpunkten ermöglichen durch geeignete Ausgleichung nicht nur eine genauere Vernetzung, sondern auch die Bereinigung eines eventuellen zeitlichen Trends in den ermittelten GPS-Koordinaten.
Online-Methoden (Korrektursignale)
Im Allgemeinen werden jedoch die Korrekturdaten der Referenzstation(en) direkt an alle Empfänger gefunkt oder – im Falle regionaler Permanentstationen – auch über das Internet verbreitet.
Durch telefonische oder Funkübertragung der Korrekturdaten einer Basisstation kann jeder Rover sofort seine Ortungsgenauigkeit erhöhen. Eine feinere Korrektur kann auch im Nachhinein erfolgen, wenn Rover und Basisstation alle Daten zur Positionsbestimmung aufzeichnen (Postprocessing).
Die Korrekturdaten können vom Anwender selbst erzeugt werden, wenn ein zweiter GPS-Empfänger vorhanden ist. Um aber auf Zweitgeräte verzichten zu können, haben viele Länder permanente Referenzstationen eingerichtet, die von Anwendergruppen oder der amtlichen Landesvermessung betrieben werden (z. B. das SAPOS-Netz der deutschen Bundesländer). Dadurch sind auch mit nur einem Empfänger hochgenaue Positionsbestimmungen möglich, bei entsprechender Hardware sogar praktisch in Echtzeit.
- Für Deutschland wurde SAPOS-HEPS (Hochpräziser Echtzeit Positionierungs-Service) entwickelt. Er bietet eine Lagegenauigkeit von ca. 1–2 cm und eine Höhengenauigkeit von ca. 2–3 cm.
Für Messungen im SAPOS-System benötigt man Roverausrüstung mit einem geodätischen, RTK-fähigen GNSS-Empfänger, sowie ein Modem / Handy für den Empfang der SAPOS-Daten. Man kann sich dabei (unter Beibehaltung von Satellitenkontakt und Handyverbindung) von Punkt zu Punkt bewegen, ohne den Empfänger jedes Mal neu initialisieren zu müssen. Dies ermöglicht flexibles Arbeiten und man erhält sofort die Koordinate eines Punktes im ETRS-Koordinatensystem. Als Beobachtungszeit pro Punkt genügen 5–20 Sekunden.
Vorteil: Wirtschaftlichkeit durch geringen Zeit- und Personalaufwand. Koordinaten direkt erhältlich ohne innendienstliche Nachbearbeitung. Keine Abhängigkeit von Tageszeit oder Wetter.
Nachteil: Koordinatenbestimmung in Pr.La nur durch Koordinaten-Transformation.- In anderen Ländern wurden ähnliche Datendienste aufgebaut, die entweder amtlich, von Vermessungsdiensten oder von EVUs betrieben werden. In Österreich sind es v.a. Kraftwerksbetreiber und das dGPS der Ingenieurbüros, in der Schweiz das swipos der Landestopografie, in Deutschland neben Sapos Anbieter wie ALF, AMDS oder ascos.
- Bei der Methode der Pseudorange-Korrektur berechnet die Basisstation die Fehler der Strecken zu den Satelliten und übermittelt diese an den Rover. So ist auch eine Korrektur möglich, wenn von der Basisstation und dem Rover unterschiedliche Satelliten empfangen werden. Es sind Genauigkeiten <1 m möglich.
- Bei sehr genauen Messungen wird auch die Phasenlage der Satellitensignale ausgewertet. Dadurch sind Genauigkeiten von ± 1 bis ± 10 mm pro km Abstand zur Basisstation erreichbar.
- Auf dem Meer ist geringere Genauigkeit ausreichend, doch eine Verbreitung über Radio nützlich. Für die Bundesrepublik Deutschland werden Differential-Stationen von der Wasser- und Schifffahrtsverwaltung betrieben. Sie arbeiten nach dem internationalen IALA-Standard und senden Korrekturdaten auf Mittelwelle für den Küsten- und Binnenbereich aus. Zentrale technische Behörde ist die Fachstelle der WSV für Verkehrstechniken in Koblenz.
Datenformate
 Holux Datenlogger zur Aufzeichnung von GPS-Daten
Holux Datenlogger zur Aufzeichnung von GPS-DatenAls Standardformat von GPS-Daten dient das RINEX-Format, eine Standard- und Formatdefinition, die einen freien Austausch von GPS-Rohdaten ermöglichen soll. Für den Austausch von GPS-Daten in Echtzeitanwendungen ist das RTCM-Format von Bedeutung.
Siehe auch: NMEA 0183Neben diesen Basisformaten speichern die GPS-Geräte unterschiedlicher Hersteller die GPS-Ergebnisse (Routen, Track Logs und Wegpunkte) häufig in eigenen proprietären Dateiformaten. Als allgemeine Austauschformate bieten sich das gpx-Format und das Google Earth eigene .kml-Format an. Eine Konvertierung zwischen verschiedenen Formaten erlaubt die freie Software GPSBabel.
Störsender
Um das System zu stören, gibt es zum einen die Möglichkeit des Jammings (Jammer = engl. für Störsender), siehe GPS-Jammer, weiterhin des GPS-Spoofing. Allerdings könnten die USA aus politischen Gründen auch das GPS-Signal verzerren oder für eine unbestimmte Zeit in einigen Gebieten auf der Welt das Signal abschalten.
Alternativen
- GLONASS
- Das russische Pendant zum amerikanischen NAVSTAR GPS.
- Euteltracs
- Europäisches Positionssystem für Fernverkehr (sehr ungenau). Es sendet auf einer Frequenz von 10–14 GHz und ist seit 1991 in Betrieb.
- Galileo
- EU und ESA haben gemeinsam die Entwicklung eines europäischen Systems zur Satellitennavigation für überwiegend zivile Anwendungen mit dem Namen Galileo vorangetrieben. Die Entwicklungs- und Testphase wurde im Dezember 2004 in einem 4-Jahresvertrag an die Industrie vergeben. Nach Ablauf dieses Vertrages sollten 32 Galileo-Satelliten im All und der Großteil des Bodensegments installiert sein. Der ursprüngliche Zeitplan sah wie folgt aus: Bis 2005 Entwicklungs- und Testphase, Aufbau des Satellitennetzes ab 2006, Testphase ab 2008. Bis Ende 2008 waren allerdings erst die beiden Testsatelliten Giove-A1 und Giove-B im All.
- Es werden fünf Dienste zur Verfügung gestellt: OS, CS, SoL, PRS, SAR. Die zivile und kostenlose Positionsbestimmung (OS) wird eine Genauigkeit von 4–8 m bereitstellen. Beim SoL-Dienst wird zusätzlich noch Integrität, also die rechtzeitige Warnung des Nutzers (innerhalb von 6s), wenn der Positionierungsfehler größer als eine vorgegeben Schranke (12 m horizontal, 20 m vertikal) ist, bereitgestellt. Der PRS-Dienst wird die Bedürfnisse staatlicher Organisationen befriedigen, z. B. Polizei und Luftfahrt. Im CS-Dienst können noch zusätzlich Informationen mit geringer Datenrate an Abonnenten übertragen werden. SAR dient zur Ortung von Notsendern, so erhalten Rettungsstellen auf schnellem Wege Angaben zum Notfallort.
- Compass
- Das Navigationssystem der Volksrepublik China (Sendefrequenz 1,4 GHz). Seit 2004 in Betrieb, allerdings beschränkt sich die Nutzung auf den asiatischen Bereich.
GPS und Datenschutz
Der Aufenthaltsort des Trägers eines GPS-Empfängers lässt sich, da die Geräte momentan nur passiv arbeiten und keine Signale senden, nicht verfolgen. Für eine GPS-Überwachung benötigt man eine Kombination aus einem passiven GPS-Empfänger mit einem aktiven Sender, der die ermittelten Positionsdaten an Dritte weitergibt.
GPS wird von der deutschen Polizei für Ermittlungen eingesetzt. Es dient zur Überwachung bestimmter Fahrzeuge und Fahrer. Im April 2005 entschied das Bundesverfassungsgericht, dass der Einsatz des satellitengestützten Systems zur Überwachung in einem strafrechtlichen Ermittlungsverfahren nicht gegen das Grundgesetz verstoße. Der Zweite Senat wies mit diesem Urteil eine Verfassungsklage eines Ex-Mitglieds der Antiimperialistischen Zellen (AIZ) zurück, das beanstandet hatte, eine zweieinhalb Monate andauernde Überwachung seines Fahrzeugs und dessen verschiedener Benutzer habe in übertriebener Weise in Grundrechte der Überwachten eingegriffen.
GPS in der Praxis
Der Einsatz von GPS-Geräten hat in den letzten Jahren durch die preiswerte Technik erheblich zugenommen. Ein verbreitetes Einsatzgebiet ist das Flottenmanagement von Verkehrsbetrieben und des Transportwesens zu Land und auf Wasser/See. Wenn die Fahrzeuge mit GPS und einem Transponder ausgerüstet sind, hat die Zentrale jederzeit einen Überblick über den Standort der Fahrzeuge.
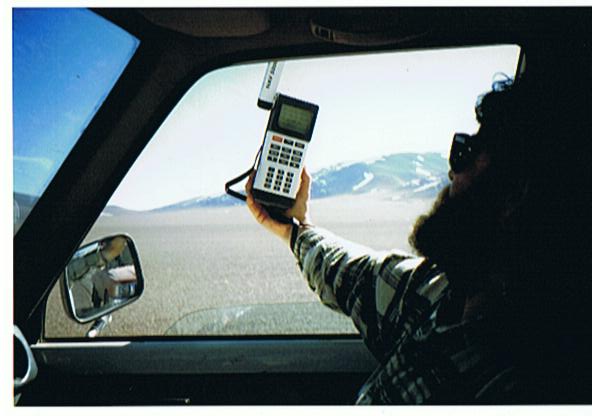
 Gebrauch eines GPS-Empfängers bei der Geländearbeit (Hochanden, 1993)
Gebrauch eines GPS-Empfängers bei der Geländearbeit (Hochanden, 1993)Handelsübliche zivile GPS-Geräte eignen sich für den Einsatz im Auto und im „Outdoor“-Bereich. Handelsübliche GPS-Empfänger (GPS-Mäuse) verwenden meist das NMEA 0183-Datenformat zur Ausgabe der Positionsdaten.
Einstellbar sind bei den meisten Geräten verschiedene Ausgabeformate wie UTM, MGRS, geographische Koordinaten in Grad, Minuten, Sekunden und weitere. Zur Übertragung von numerischen Koordinaten auf und zur Ermittlung von topographischen Karten ist ein Planzeiger im gleichen Maßstab wie die Karte erforderlich.
Zu den Herstellern von GPS-Empfängern zählen Garmin, Magellan, TomTom, HAiCOM, Globalsat und RoyalTek sowie die Hersteller von Smartphones.
Nachteile
In der Berufsschifffahrt wie in anderen Gewerben galt früher rechtlich die Standortermittlung mittels GPS lediglich als ergänzendes Hilfsmittel zur terrestrischen und astronomischen Standortbestimmung. Der Grund war die damals nicht ausreichend gesicherte Zuverlässigkeit und der künstliche Fehler.
2006 entdeckte Alessandro Cerruti von der amerikanischen Cornell University, dass GPS durch Sonneneruptionen gestört werden kann. In den vergangenen Jahren waren diese – und die damit verbundenen geomagnetischen Stürme – wenig ausgeprägt, sie sollen jedoch bis 2014 wieder zunehmen.
Auch kann der GPS-Empfang durch starke Schneefälle gestört werden. Sonstige Wetterverhältnisse, wie Regen und Nebel, beeinträchtigen den Empfang normalerweise jedoch nicht – allerdings ist der Empfang unter regennassem Laub im Wald deutlich schlechter als bei trockener Witterung.
Im geschäftlichen, sicherheitstechnischen und medizinischen Einsatz
Einsatzmöglichkeiten im geschäftlichen, sicherheitstechnischen und medizinischen Umfeld sind zum Beispiel:
- Trace und Tracking zur Ermittlung und Speicherung von Routen und deren Zeit wie für ein elektronisches Fahrtenbuch.
- Lokalisation der Standorte von Mitarbeitern, Produkten oder Schutzbefohlenen wie Kinder, Kranke und ältere Menschen.
- Geofencing zur Verfolgung von Standorten und Geschehnissen in Echtzeit wie für den Personen- und Fahrzeugschutz bei Werttransporten.
- automatische Steuerung, Überwachung und Aufzeichnung von landwirtschaftlichen Geräten bei der Bestellung von großen Flächen, wobei heute viele Mähdrescher und ähnliche Fahrzeuge mit dieser Technik ausgerüstet sind.
- Auch die modernen Ausführungen der Elektronischen Fußfessel sind mit GPS ausgerüstet.
GPS beim Sport
 GPS-Datenlogger
GPS-Datenlogger GPS-Empfänger im Armbanduhrformat
GPS-Empfänger im ArmbanduhrformatGPS-Datenlogger (zur Erstellung von Tracks) und kleine Navigationsgeräte werden für Individualsport (Jogging, Radfahren, …) z. B. zur persönlichen Trainingsplanung und -überwachung zunehmend eingesetzt.
Für Sportwettkämpfe gilt, dass eine GPS-Kontrolle jedes Wettkämpfers (ähnlich dem auf Transpondertechnik basierenden ChampionChip-System) grundsätzlich technisch möglich ist, aber die breite Anwendung auf klassische Wettkampfformate (Breitensportveranstaltung) noch auf sich warten lässt. Am 1. Mai 2010 wurde der Dresdner 100km-Duathlon als erste Breitensportveranstaltung vollständig und systemidentisch GPS-aufgezeichnet.[22] Bei Sportartexoten wie Geocaching, Kitesurfen, Paragleiten und Segelfliegen hingegen wird eine GPS-Überwachung heutzutage schon durchgeführt.
Eine GPS-gestützte Wettkampfüberwachung bietet Vorteile, wie:
- Kontrollfunktion: Streckenkonformität (Kürzen die Sportler die vorgegebene Wettkampfstrecke ab?) Dieser Vorteil ist vor allem für den Veranstalter des Wettkampfes relevant.
- Erlebniswert: Nachvollziehbarkeit des Wettkampfgeschehens im Detail, schafft für die Sportler einen Mehrwert an der Sportveranstaltung.
- Live-Übertragung: Voraussetzung dafür ist die direkte Übertragung der Geodaten und die Darstellung des Wettkampfes. Damit kann z.B. über das Internet eine breite Öffentlichkeit erreicht werden.
In der Luftfahrt
 Garmin GPS IIplus bei einem Flug mit einem Motorschirm-Trike
Garmin GPS IIplus bei einem Flug mit einem Motorschirm-TrikeGrößter Profiteur des GPS ist die zivile Luftfahrt. Alle modernen Navigationssysteme sind GPS-gestützt, insbesondere in der Verkehrsluftfahrt sind jedoch weiterhin Systeme in Form von VOR- oder NDB-Empfängern und die Trägheitsnavigation üblich, das GPS nimmt hier in der Regel nur eine unterstützende Funktion ein.
Theoretisch, vorbehaltlich der Zulassung, erlauben die Genauigkeiten (P/Y-Signal) sogar automatische Landungen, sofern die Mittellinien der Landebahnen vorher genau vermessen wurden, d. h. die Koordinaten bekannt sind und zusätzlich DGPS eingesetzt wird. Einige unbemannte Luftfahrzeuge, wie EuroHawk benutzen dieses Verfahren. In der Verkehrsluftfahrt ist es zurzeit (Ende 2008) teilweise zugelassen. Ob ein Anflug nur mit dem GPS als Navigationssystem zugelassen ist, hängt von den Sichtbedingungen, dem genutzten System (GPS, DGPS) und der Ausrüstung von Luftfahrzeug und Landebahn ab. Eine Vorreiterrolle nehmen hier die Vereinigten Staaten ein, jedoch verbreiten sich GPS-gestützte Anflüge auch in Europa immer mehr.
Insbesondere in Sportflugzeugen wie Segelfliegern, Ultraleichtflugzeugen, die nicht über Funknavigationsanlagen wie VOR- oder NDB-Empfänger verfügen, erfreuen sich GPS-Empfänger großer Beliebtheit. Da sich der Pilot durch die einfachere Navigation voll auf das Fliegen konzentrieren kann, steigert die GPS-Nutzung auch die Sicherheit, die Wahrscheinlichkeit des Verfliegens sinkt. Jedoch muss auch immer mit einem Ausfall des Systems gerechnet werden, da es bei blindem Vertrauen in das System und gleichzeitigem Ausfall zu einem Verlust der Kenntnis der eigenen Position kommen kann, wodurch es unter Umständen auch zu gefährlichen Situationen, wie Treibstoffmangel, Einflug in Flugverbotszonen usw. kommen kann.
Wie bei der Nutzung in Kraftfahrzeugen gibt es sowohl fest eingebaute Systeme, wie auch nachgerüstete Geräte. Insbesondere die Nutzung von PDAs mit angeschlossenen GPS-Mäusen nimmt im Freizeitbereich stark zu, da mit geringem Aufwand und Kosten ein leistungsstarkes Navigationssystem nachgerüstet werden kann.
Im Auto
 Integriertes Navigationssystem mit Bildschirm von Audi
Integriertes Navigationssystem mit Bildschirm von Audi Mobiles Navigationssystem für die Benutzung im Auto, Fahrrad oder zu Fuß (Größe: 10cm breit, 7cm hoch)
Mobiles Navigationssystem für die Benutzung im Auto, Fahrrad oder zu Fuß (Größe: 10cm breit, 7cm hoch)Hier handelt es sich um GPS-Geräte, die mit umfangreicher Landkarten- und Stadtplan-Software ausgestattet sind. Sie ermöglichen meist akustische Richtungsanweisungen an den Fahrer, der zum Beispiel am Beginn der Fahrt lediglich den Zielort wie z. B. Straßenname und Ort einzugeben braucht. Im Auto wird bei Festeinbauten ab Werk (siehe Infotainmentsystem) unterschieden zwischen Systemen, die Sprachausgabe mit Richtungsangaben auf einem LCD (meist im Autoradioschacht) kombinieren, sowie Sprachausgabe mit farbiger Landkartendarstellung, bei welcher der Fahrer besser räumlich sieht, wo er unterwegs ist.
In letzter Zeit haben PDA-, Smartphone- und mobile Navigationssysteme starken Zuwachs erhalten. Sie können flexibel in verschiedenen Fahrzeugen schnell eingesetzt werden. Meist wird die Routenführung grafisch auf einem Farbbildschirm mit Touchscreen dargestellt. Auch ist die Verbreitung durch ständig fallende Preise zu erklären.
Bei den meisten Festeinbauten ab Werk sowie den neuesten PDA- und PNA-Lösungen werden Verkehrsmeldungen des TMC-Systems, wonach der Fahrer automatisch an Staus oder Behinderungen vorbeidirigiert werden soll, auch mit berücksichtigt.
Festeingebaute Systeme sind in der Regel zwar erheblich teurer als mobile Geräte in Form von z. B. PDAs, haben jedoch den Vorteil, dass sie mit der Fahrzeugelektronik gekoppelt sind und zusätzlich Odometrie-Daten wie Geschwindigkeit und Beschleunigung verwenden, um die Position präziser zu bestimmen und auch noch in Funklöchern wie z. B. Tunneln eine Position ermitteln zu können.
Der Vorteil der stark zunehmenden Navigation in Autos liegt darin, dass der Fahrer sich ganz auf den Verkehr konzentrieren kann. Auch kann ca. 1–3 % Treibstoffverbrauch eingespart werden, wenn alle Fahrzeuge den optimalen Weg wählen.
GPS kann auch zur Diebstahlsicherung genutzt werden. Hierzu wird die GPS-Anlage z. B. des Fahrzeuges mit einem GSM-Modul kombiniert. Das Gerät sendet dann, im Falle eines Fahrzeugdiebstahls, die genauen Koordinaten an einen Dienstleister. In Verbindung mit einem PC kann dann z. B. über das Internet sofort die entsprechende Straße und der Ort abgelesen und die Polizei alarmiert werden.
Den großen Unterschied macht jedoch heute in miteinander vergleichbaren Systemen weniger die Technik, sondern vielmehr das jeweilige Navigationsprogramm und deren benutze Datenbasis aus. So gibt es derzeit von Programm zu Programm noch durchaus Unterschiede in der Routenführung.
Im Freien
 Spezielles Foto-GPS auf GPS-fähiger Kamera
Spezielles Foto-GPS auf GPS-fähiger Kamera Foto-GPS als Universalmodell für alle Kameras mit Blitzschuh (außer Sony)
Foto-GPS als Universalmodell für alle Kameras mit Blitzschuh (außer Sony)GPS-Geräte eignen sich auch zum Einsatz am Fahrrad, beim Wandern (zum Beispiel als kompaktes Gerät am Handgelenk) oder im Flugzeug oder neuerdings auch beim Fotografieren (Geo-Imaging, Geotagging, Georeferenzierung[23]). Der Funktionsumfang der im Handel erhältlichen Geräte richtet sich nach Anwendungsbereich und Preis. Schon einfache Geräte können heute nicht bloß die Längen- und Breitengrade anzeigen, sondern auch Richtungsangaben machen, Entfernungen berechnen und die aktuelle Geschwindigkeit angeben. Die Anzeige kann so eingestellt werden, dass ein Richtungssymbol ausgegeben wird, das in die Richtung zeigt, die vom Benutzer durch die Eingabe der Zielkoordinaten (Wegpunkt) angegeben worden ist. GPS-Geräte stellen hier eine Weiterentwicklung der klassischen Navigation mit Kompass und Karte dar. Diese Funktion verwendet man zum größten Teil bei der Schatzsuche per GPS (Geocaching). Hochwertige, moderne Geräte können neben Wegpunkten, Routen und Track Logs auch digitale Karten speichern und damit den aktuellen Standort auf einer Karte darstellen. Für den Außenbereich liegen für verschiedene Länder topografische Karten im Maßstab 1:25.000 zur Nutzung mit dem GPS vor.
Wenngleich die Outdoor-GPS-Geräte dafür nicht primär gedacht sind, können selbst kleine Armbandgeräte in Autos oder in der Bahn (Fensterplatz, ggf. im Wagenübergang) verwendet werden; der Empfang in Gebäuden ist jedoch mit diesen Geräten gewöhnlich nicht möglich.
In der Seefahrt
Ein breites Angebot von GPS-Geräten ist auf die besonderen Anforderungen der Navigation in der Seefahrt zugeschnitten. GPS gehört heute zur Grundausstattung eines Schiffes, meist als Kartenplotter, bei dem der über GPS ermittelte Schiffsort in Echtzeit auf einer Elektronischen Seekarte angezeigt wird. Mobile GPS-Empfänger gibt es seit den 1980er Jahren. Mit einem Navigationsprogramm und einer GPS-Maus kann auch auf dem PC, Notebook oder PDA navigiert werden; heute sind auch viele Mobiltelefone GPS-fähig. In der Großschifffahrt werden integrierte elektronische Informations-, Navigations- und Schiffssteueranlagen (ECDIS) verwendet. Die für die Seenavigation bestimmten Geräte verfügen in der Regel über eine Kartenanzeige („Moving Map“) mit speziellen, elektronischen Seekarten in verschlüsselten Formaten. OpenSeaMap verwendet ein freies Format. Viele der Geräte sind wasserdicht gebaut; anspruchsvollere ermöglichen auch die kombinierte Darstellung der Seekarten mit weiteren Daten wie Wetterkarten oder Radardarstellungen. Beim AIS dient das GPS neben der Positionsermittlung auch als Zeitbasis für die Koordinierung der Sendefolge.
In Gebäuden
In Gebäuden ist der GPS-Empfang generell reduziert bis unmöglich. Im konkreten Fall hängt es neben den verwendeten Baustoffen im Gebäude und deren Dämpfungsverhalten auch vom Standort innerhalb eines Gebäudes ab. In Fensternähe bzw. in Räumen mit großen Fenstern und freier Sicht auf den Himmel in Südrichtung kann je nach momentaner Satellitenposition durchaus noch eine Standortbestimmung mit reduzierter Genauigkeit möglich sein. In abgeschatteten Räumen wie beispielsweise Kellern ist der GPS-Empfang praktisch immer unmöglich.
Mit neueren Empfänger-Chipsätzen der Firma SiRF (etwa SiRF Star III) oder der Firma u-blox (z. B. u-blox-5) ist in manchen Situationen wie in Gebäuden ein GPS-Empfang durch in Hardware massiv parallelisierte Korrelationsempfänger möglich. Statt wie bei herkömmlichen GPS-Empfängern die Korrelationen der Codefolgen (CDMA) zeitlich hintereinander durchzuprobieren und sich nur auf einen Empfangsweg festlegen zu können, werden bei diesen Chipsätzen 204.800 Korrelationsempfänger (SiRF Star III) parallel eingesetzt und zeitgleich ausgewertet. Damit kann der Mehrwegeempfang reduziert werden und in Kombination mit einer gesteigerten Eingangsempfindlichkeit des HF-Eingangsteils können die an Wänden oder Böden reflektierten GPS-Funksignale unter Umständen auch im Inneren von Gebäuden oder engen Gassen in dicht verbauten Gebieten noch ausgewertet werden. Allerdings ist bei indirektem Empfang von GPS-Signalen über Reflexionen eine Reduktion der Genauigkeit verbunden, da das Signal dann eine längere Laufzeit aufweist und die genauen zeitlichen Bezüge nicht mehr passen. Der zusätzliche Fehler über Mehrwegeempfang kann einige 10 m betragen.
GPS bei Ermittlungen gegen mutmaßliche Verbrecher
Die Verwendung von GPS bei strafrechtlichen Ermittlungen in Deutschland ist legitim. Der Europäische Gerichtshof für Menschenrechte (EGMR) wies am 2. September 2010 die Klage eines einstigen Mitglieds der linksextremistischen "Antiimperialistischen Zelle" (AIZ) ab. Damit hat der EGMR die Einschätzung des Bundesverfassungsgerichts bestätigt, das am 12. April 2005 (2 BvR 581/01) auch so geurteilt und die Beschwerde von Bernhard Uzun zurückgewiesen hatte.[24]
Der EGMR wies in seinem Urteil darauf hin, dass mit der Überwachung weitere Bombenanschläge verhindert werden sollten. "Sie diente damit dem Interesse der nationalen und öffentlichen Sicherheit, der Vorbeugung von Verbrechen und dem Schutz der Rechte der Opfer." [25]
Als Kunstform
GPS-Drawing bezeichnet das Erstellen von Bildern durch Aufzeichnung einer Route mit dem GPS-Empfänger. Hierbei werden aufgezeichnete Routen, auch Tracks genannt, später einfach am PC bearbeitet und als Bilddatei gespeichert. Teilweise werden auch Luftaufnahmen auf die Tracks überlagert. Möglich ist das GPS-Drawing mit jedem GPS-Gerät, das über eine Aufzeichnungsfunktion verfügt.
Literatur
- Günter Seeber: Satellite Geodesy. 2. Auflage. De Gruyter, Berlin 2003, ISBN 3-11-017549-5
- Guochang Xu: GPS. Theory, Algorithms and Applications. Springer, Berlin 2003, ISBN 3-540-67812-3
- Manfred Bauer: Vermessung und Ortung mit Satelliten. 6. Auflage. Wichmann, Berlin 2011, ISBN 978-3-87907-482-2
- Elliott D. Kaplan (Hrsg.): Understanding GPS. Principles and Applications. Artech House, Boston 1996, ISBN 987-3-87907-482-2
- Rainer Höh: GPS-Outdoor-Navigation. Reise-Know-How-Verlag Rump, Bielefeld 2005, ISBN 3-8317-1116-X
- Uli Benker: GPS. Praxisbuch und Ratgeber für die GPS-Navigation auf Outdoor-Touren. Bruckmann, München 2009, ISBN 3-7654-5110-X
- Ralf Schönfeld: Das GPS-Handbuch. Monsenstein und Vannerdat, 2005, ISBN 3-86582-234-7 (Zwei Bände, Band 1: Grundlagen, Basis-Funktionen, Navigation und Orientierung, Karten.)
- Alois Goiser: Handbuch der Spread-Spectrum-Technik. Springer, Wien 1998, ISBN 3-211-83080-4
- Jean-Marie Zogg: GPS und GNSS: Grundlagen der Ortung und Navigation mit Satelliten. u-blox, Thalwil 2009 (Online-Publikation, PDF, 8MB)
Siehe auch
- AGPS – schnellere Positionsbestimmung durch GPS in Kombination mit Positionsdaten von GSM-Betreibern
- APRS – Automatic Position Reporting System (GPS Positionsdatenübermittlung im Amateurfunkdienst)
- DGPS – Differential Global Positioning System
- Geocaching – Schatzsuche mit GPS-Empfängern
- Geodätisches Datum – zu Grunde liegende Ellipsoidmodelle der Erde, beispielsweise WGS84
- Geo-Imaging – Fotoverortung, Fotos mit Koordinaten versehen
- GPS-Levelling – Geoidbestimmung durch Kombination von GPS und Nivellement
- GpsDrive – freie Navigationssoftware unter Linux
- Navit – freie Navigationssoftware für eine Reihe verschiedener Betriebssysteme
- GPS-Technik
- Liste der Navigationssatelliten
- Live-Tracking
- mobiles Navigationssystem
- RAIM – Receiver Autonomous Integrity Monitoring (eine Technologie zur Überprüfung der Integrität von GPS)
- Quasi-Zenit-Satelliten-System - Japans System mit geplanten 3 Satelliten
Weblinks
 Commons: Global Positioning System – Sammlung von Bildern, Videos und Audiodateien
Commons: Global Positioning System – Sammlung von Bildern, Videos und Audiodateien- aktuelle Satellitenkonstellation
- GPS Standard Positioning Service Performance Standard. Department of Defense (USA), 15. Oktober 2001, abgerufen am 1. Mai 2011 (PDF; 2,05 MB, englisch).
- GPS Standard Positioning Service Performance Standard. Department of Defense (USA), 1. Oktober 2008, abgerufen am 1. Mai 2011 (PDF; 1,63 MB, englisch).
- GPS General Information US Coast Guard
- Beispiel-Datensätze, C-Code (engl.)
- Profile: GPS Architect, Bradford W. Parkinson Der Vater von GPS
- alpentunnel.de GPS und historische Vermessung
- Die GPS-Satelliten bei Skyrocket
Einzelnachweise
- ↑ Mobile Computing: Grundlagen, Technik, Konzepte; Heidelberg, dpunkt-verlag 2002, Seite 259
- ↑ IS-GPS-200 Offizielle Website der GPS PUBLIC INTERFACE CONTROL WORKING GROUP (engl.) mit der Referenzdokumentation IS-GPS-200 in der jeweils aktuellen Fassung.
- ↑ Decode Systems: Global Positioning System
- ↑ Patent DE743758: Standortanzeiger, insbesondere für Luftfahrzeuge. Angemeldet am 11. Mai 1939, Erfinder: Hans Joachim Janke.
- ↑ Mitteldeutscher Rundfunk (Hrsg.): Genie und Wahnsinn. In: mittendrin, Ausgabe Sachsen. 16, Nr. 11, Leipzig 2007 (PDF, 5,4 MB, abgerufen am 10.6).
- ↑ How Global Positioning Systems Work, pcmag.com, 8. Juli 2008
- ↑ a b http://space.skyrocket.de/doc_sdat/navstar-2a.htm
- ↑ a b c http://space.skyrocket.de/doc_sdat/navstar-2f.htm
- ↑ The May 2 Transition as Observed from Multiple International Sites
- ↑ [1] Datum. 28 Mai 2010, Zugriff: 28. Mai 2010
- ↑ a b Janes Defense Weekly, 21. Mai 2008, p.10
- ↑ http://www.lockheed-martin.com/products/GPS/index.html
- ↑ a b http://space.skyrocket.de/doc_sdat/navstar-3a.htm
- ↑ http://www.insidegnss.com/node/1574
- ↑ http://space.skyrocket.de/doc_sdat/navstar-2r.htm
- ↑ [2]
- ↑ http://space.skyrocket.de/doc_sdat/navstar-2rm.htm
- ↑ http://www.spaceflightnow.com/delta/d349/
- ↑ GPS III (GlobalSecurity)
- ↑ J.-F. Pascual-Sánches: Introducing relativity in global navigation satellite systems. In: Annalen der Physik. 16, Nr. 4, Wiley-VCH, Leipzig 2007, ISSN 0003-3804, S. 258–273, doi:10.1002/andp.200610229.
- ↑ http://www.100km-duathlon.de/index.php/100km-duathlon-2010/ergebnisse/208-racemap-2010.html
- ↑ commons:Commons:Georeferenzierung Auch auf Wikimedia Commons gibt es georeferenzierte Fotos
- ↑ www.bverfg.de
- ↑ spiegel.de vom 2. September 2010: Europa-Richter billigen heimliche GPS-Überwachung
Globale Systeme Historisch:
 Transit ·
Transit ·  Parus/Zikada In Betrieb: GPS
Parus/Zikada In Betrieb: GPS  GLONASS · Im Aufbau:
GLONASS · Im Aufbau:  Compass ·
Compass ·  Galileo
GalileoRegionale Systeme oder regionale Ergänzungssysteme Im Aufbau:
 QZSS · In Planung:
QZSS · In Planung:  IRNSS
IRNSSUnterstützende satellitenbasierte Systeme (SBAS) In Betrieb:
WAAS · MSAS · EGNOS Im Aufbau: GAGAN · SDCMSiehe auch Liste der Navigationssatelliten
Wikimedia Foundation.
Schlagen Sie auch in anderen Wörterbüchern nach:
Global positioning system — Pour les articles homonymes, voir GPS (homonymie). Le Global Positioning System plus connu par son sigle GPS, que l on peut traduire en français par « système de positionnement mondial » ou encore (en respectant le sigle) Géo… … Wikipédia en Français
Global Positioning System — Glob al Po*si tion*ing Sys tem n. (gl[=o] b l p[ o]*z[i^]sh [u^]n*[i^]ng s[i^]s t[e^]m) A worldwide system of electronic navigation in which a vessel, aircraft or missile determines its latitude and longitude by measuring the transmission time… … The Collaborative International Dictionary of English
global positioning system — global positioning systems N COUNT A global positioning system is a system that uses signals from satellites to find out the position of an object. The abbreviation GPS is also used … English dictionary
Global Positioning System — Global Positioning System, GPS … Universal-Lexikon
global positioning system — UK US noun [C] IT, TRANSPORT ► GPS(Cf. ↑GPS) … Financial and business terms
Global Positioning System — GPS redirects here. For other uses, see GPS (disambiguation). Geodesy Fundamentals … Wikipedia
Global Positioning System — « GPS » redirige ici. Pour les autres significations, voir GPS (homonymie). Un satellite NAVSTAR (Navigation Satellite Timing And Ranging) appartenant à la constellation du GPS … Wikipédia en Français
Global Positioning System — noun a navigational system involving satellites and computers that can determine the latitude and longitude of a receiver on Earth by computing the time difference for signals from different satellites to reach the receiver • Syn: ↑GPS •… … Useful english dictionary
Global Positioning System — globalinė padėties nustatymo sistema statusas Aprobuotas sritis geodezija apibrėžtis Specialiųjų dirbtinių Žemės palydovų ir prietaisų visuma erdvinėms geodezinėms koordinatėms nustatyti radionavigaciniu metodu. santrumpa( os) GPS atitikmenys:… … Lithuanian dictionary (lietuvių žodynas)
Global\ Positioning\ System — Weltumspannendes System, bestehend aus 24 Satelliten, zur Positionsbestimmung und Navigation. Global Positioning System (GPS) wird von Flugzeugen, Schiffen, Fahrzeugen oder einzelnen Personen verwendet. Ursprünglich vom amerikanischen Militär… … Online-Wörterbuch Deutsch-Lexikon
- Kontaktieren Sie uns: Unterstützung, Werbung
Global Positioning System













18+
© Academic, 2000-2024
Wörterbücher Export, schritte mit PHP, Joomla, Drupal, WordPress, MODx.